はじめに
『スタンフォード ベクトル・行列からはじめる最適化数学』の学習ノートです。
「数式の行間埋め」や「Pythonを使っての再現」によって理解を目指します。本と一緒に読んでください。
この記事は5.4節「グラム・シュミット法」の内容です。
2ベクトルの正規直交ベクトルを導出します。
【前の内容】
【他の内容】
【今回の内容】
グラム・シュミット法の導出
グラム・シュミット法(Gram-Schmidt algorithm)によるベクトルの正規直交化(orthogonalization)の計算を数式とグラフで確認します。
正射影については「5.3:正射影ベクトルの導出【『スタンフォード線形代数入門』のノート】 - からっぽのしょこ」を参照してください。
次のライブラリを利用してグラフを作成します。不要であれば省略してください。
# 利用ライブラリ import numpy as np import matplotlib.pyplot as plt
式の導出
グラム・シュミット法による正規直交化の計算式を導出します。2次元の場合を例として図示しますが、次元に関わらず成立します。
ベクトルと
を正規直交化したベクトル
と
を考えます。
2つのベクトルとなす角の関係をグラフで確認します。
・作図コード(クリックで展開)
2次元ベクトルを指定して、内積を計算します。
# ベクトルを指定 a1 = np.array([4.0, 1.0]) a2 = np.array([2.0, 3.0]) # ベクトルa1,a2のなす角を計算 dot_a1a2 = np.dot(a1, a2) norm_a1 = np.linalg.norm(a1) norm_a2 = np.linalg.norm(a2) theta = np.arccos(dot_a1a2 / norm_a1 / norm_a2) print(theta) # 0からπの値 print(theta / np.pi) # 0から1の値
0.7378150601204649
0.2348538278116319
2つのベクトルを
a1, a2として値を指定します。Pythonでは0からインデックスが割り当てられるので、の値は
a1[0]に対応します。
ベクトルのなす角
を計算します。
は逆コサイン関数(コサイン関数
の逆関数)(3.4節)、
はユークリッドノルム(3.1節)でベクトルの大きさを表します。
なす角を示す角マークと角ラベルを描画するための座標を作成します。
# ベクトルa1,a2とx軸のなす角を計算 sgn_a1 = 1.0 if a1[1] >= 0.0 else -1.0 theta_a1 = sgn_a1 * np.arccos(a1[0] / norm_a1) sgn_a2 = 1.0 if a2[1] >= 0.0 else -1.0 theta_a2 = sgn_a2 * np.arccos(a2[0] / norm_a2) # 差が180°を超える場合は、負の角度を優角に変換 if abs(theta_a1 - theta_a2) > np.pi: theta_a1 = theta_a1 if a1[1] >= 0.0 else theta_a1 + 2.0*np.pi theta_a2 = theta_a2 if a2[1] >= 0.0 else theta_a2 + 2.0*np.pi # 角マーク用の値(ラジアン)を作成 rad_vals = np.linspace(start=theta_a1, stop=theta_a2, num=100) # 角マークの座標を計算 r = 0.3 angle_arr = np.array( [r * np.cos(rad_vals), r * np.sin(rad_vals)] ) print(angle_arr[:, :5]) # 角ラベルの座標を計算 r = 0.45 angle_vec = np.array( [r * np.cos(np.median(rad_vals)), r * np.sin(np.median(rad_vals))] ) print(angle_vec)
[[0.29104275 0.29049241 0.28992594 0.28934336 0.28874471]
[0.07276069 0.07492769 0.07709054 0.0792491 0.08140327]]
[0.367837 0.2592218]
詳しくは「円周上の2点を結ぶ曲線を作図したい(今書いてる)」を参照してください。
なす角のグラフを作成します。
# グラフサイズ用の値を設定 x_min = np.floor(np.min([0.0, a1[0], a2[0]])) - 1.0 x_max = np.ceil(np.max([0.0, a1[0], a2[0]])) + 1.0 y_min = np.floor(np.min([0.0, a1[1], a2[1]])) - 1.0 y_max = np.ceil(np.max([0.0, a1[1], a2[1]])) + 1.0 # 2Dベクトルのなす角を作図 fig, ax = plt.subplots(figsize=(8, 6), facecolor='white') ax.quiver(0, 0, *a1, color='red', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$a_1=('+', '.join(map(str, a1))+')$') # ベクトルa1 ax.quiver(0, 0, *a2, color='blue', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$a_2=('+', '.join(map(str, a2))+')$') # ベクトルa2 ax.plot(*angle_arr, color='black', linewidth=1) # なす角マーク ax.text(*angle_vec, s='$\\theta$', size=15, ha='center', va='center') # なす角ラベル ax.text(*0.5*a1, s='$a_1$', size=15, ha='left', va='top') # ベクトルa1ラベル ax.text(*0.5*a2, s='$a_2$', size=15, ha='left', va='top') # ベクトルa2ラベル ax.set_xticks(ticks=np.arange(x_min, x_max+0.1)) ax.set_yticks(ticks=np.arange(y_min, y_max+0.1)) ax.grid() ax.set_xlabel('$x_1$') ax.set_ylabel('$x_2$') ax.set_title('$\\theta=' + str((theta / np.pi).round(2)) + '\pi, ' + '\|a_1\|=' + str(norm_a1.round(2)) + ', ' + '\|a_2\|=' + str(norm_a2.round(2)) + '$', loc='left') fig.suptitle('angle between two vectors', fontsize=20) ax.legend() ax.set_aspect('equal') plt.show()
axes.quiver()でベクトルを描画します。第1・2引数に始点の座標、第3・4引数にベクトルのサイズ(移動量)を指定します。その他に、指定した値の通りに(調整せずに)矢印を描画するための設定をしています。
配列a1, a2の前に*を付けてアンパック(展開)して座標を指定しています。始点は原点とします。
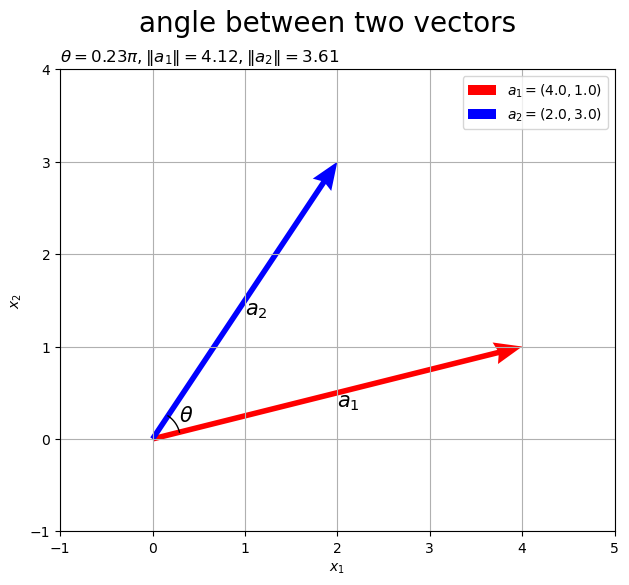
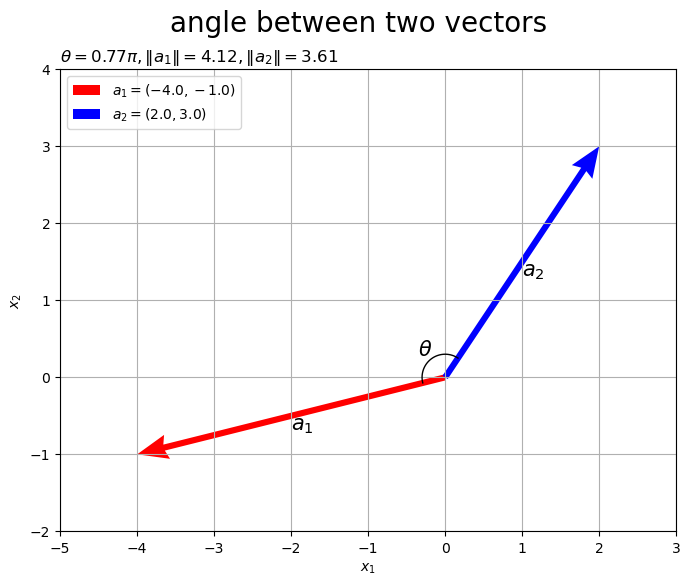
左図はなす角が鋭角のとき、右図は鈍角のときのグラフです。(左右の図の作成時に引数の設定を少し変更しています。)
のなす角を
とします。
2つのベクトルと正射影ベクトル・垂線ベクトルの関係をグラフで確認します。
・作図コード(クリックで展開)
正射影ベクトルとその直交ベクトルを計算します。
# ベクトルを正規化 q1 = a1 / norm_a1 print(q1) # 正射影ベクトルを計算 p = dot_a1a2 / norm_a1**2 * a1 print(p) # 垂線ベクトルを計算 tilde_q2 = a2 - p print(tilde_q2)
[0.9701425 0.24253563]
[2.58823529 0.64705882]
[-0.58823529 2.35294118]
直角マークを描画するための座標を作成します。
# ベクトルを正規化 q2 = tilde_q2 / np.linalg.norm(tilde_q2) # 直角マークの座標を計算 r = 0.2 rightangle_pq2_arr = np.array( [[p[0]+r*q2[0], p[0]+r*(q2[0]+q1[0]), p[0]+r*q1[0]], [p[1]+r*q2[1], p[1]+r*(q2[1]+q1[1]), p[1]+r*q1[1]]] ) print(rightangle_pq2_arr)
[[2.53972817 2.73375667 2.78226379]
[0.84108732 0.88959445 0.69556595]]
正射影ベクトルと垂線ベクトルの交点(垂線の足)の座標から、ベクトル
とベクトル
方向に少しずつ移動した点の座標を配列に格納します。
原点と点を通る(ベクトル
と平行な)直線を描画するための座標を作成します。
# 原点を通るベクトルaと平行な直線の座標を計算 line_x_vals = np.linspace(start=x_min, stop=x_max, num=101) line_arr = np.array( [line_x_vals, a1[1]/a1[0] * line_x_vals] ) print(line_arr[:, :5])
[[-1. -0.94 -0.88 -0.82 -0.76 ]
[-0.25 -0.235 -0.22 -0.205 -0.19 ]]
ベクトルの傾き
を用いて、直線の座標
を計算します。ただし、
a1[0]()が
0だと0除算になるため計算できません。
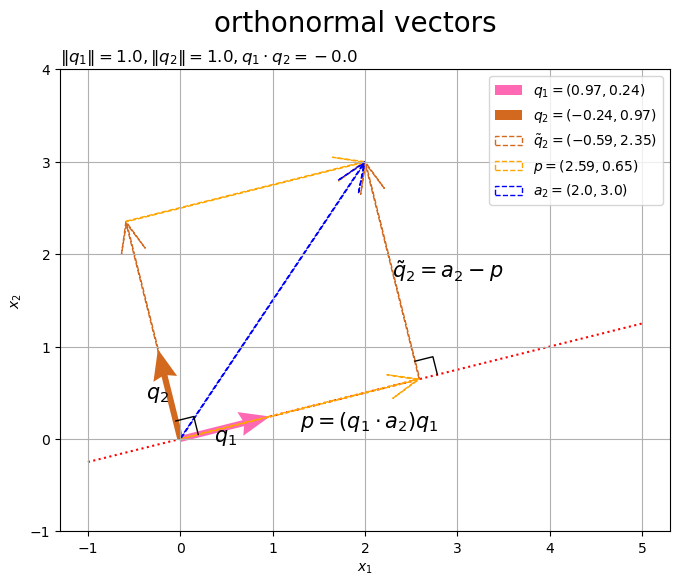
正射影のグラフを作成します。
# 2Dの正射影ベクトルを作図 fig, ax = plt.subplots(figsize=(8, 6), facecolor='white') ax.quiver(0, 0, *q1, color='hotpink', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$q_1=('+', '.join(map(str, q1.round(2)))+')$') # 正規化ベクトルq1 ax.quiver(*p, *tilde_q2, color='chocolate', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$\\tilde{q}_2=('+', '.join(map(str, tilde_q2.round(2)))+')$') # 未正規化垂線ベクトルq2 ax.quiver(0, 0, *p, color='orange', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$p=('+', '.join(map(str, p.round(2)))+')$') # 正射影ベクトルp ax.plot(*line_arr, color='red', linestyle=':', zorder=0) # 直線a1 ax.quiver(0, 0, *a1, fc='none', ec='red', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1, label='$a_1=('+', '.join(map(str, a1.round(2)))+')$') # ベクトルa1 ax.quiver(0, 0, *a2, fc='none', ec='blue', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1, label='$a_2=('+', '.join(map(str, a2))+')$') # ベクトルa2 ax.plot(*rightangle_pq2_arr, color='black', linewidth=1) # 直角マーク ax.plot(*angle_arr, color='black', linewidth=1) # なす角マーク ax.text(*angle_vec, s='$\\theta$', size=15, ha='center', va='center') # なす角ラベル ax.text(*0.5*q1, s='$q_1$', size=15, ha='center', va='top') # 正規化ベクトルq1ラベル ax.text(*0.5*p, s='$p = \\frac{a_1 \cdot a_2}{\|a_1\|^2} a_1$', size=15, ha='left', va='top') # 正射影ベクトルpラベル ax.text(*0.5*(a2+p), s='$\\tilde{q}_2 = a_2-p$', size=15, ha='left', va='center') # 未正規化垂線ベクトルq2ラベル ax.set_xticks(ticks=np.arange(x_min, x_max+0.1)) ax.set_yticks(ticks=np.arange(y_min, y_max+0.1)) ax.grid() ax.set_xlabel('$x_1$') ax.set_ylabel('$x_2$') ax.set_title('$\|q_1\|=' + str(np.linalg.norm(q1).round(2)) + ', ' + '\|p\|=' + str(np.linalg.norm(p).round(2)) + ', ' + '\|\\tilde{q}_2\|=' + str(np.linalg.norm(tilde_q2).round(2)) + '$', loc='left') fig.suptitle('vector projection', fontsize=20) ax.legend() ax.set_aspect('equal') plt.show()
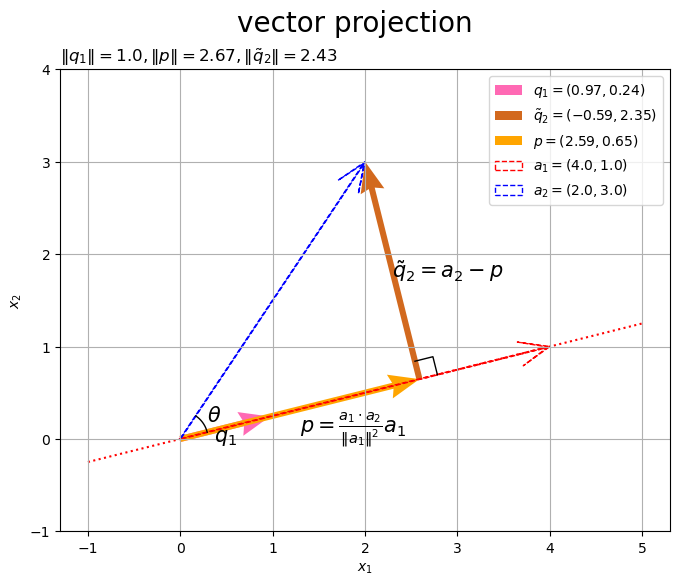
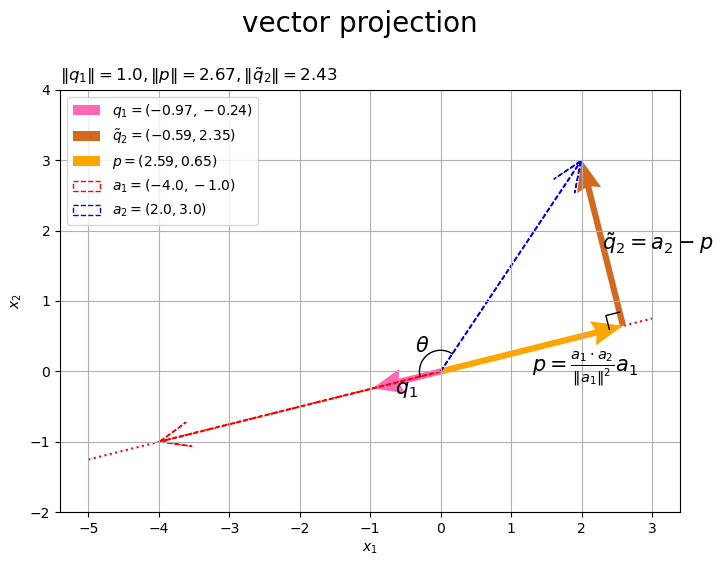
正射影ベクトルは、次の式で定義されました(5.3節)。
ベクトルを正規化したベクトルを
と置いて、正射影ベクトルの式を変形します。
ベクトルや
と直交するベクトル
として、次の式で計算できます。
2つの正規直交ベクトルの関係をグラフで確認します。
・作図コード(クリックで展開)
正規直交ベクトルを計算します。
# ベクトルを正規化 q2 = tilde_q2 / np.linalg.norm(tilde_q2) print(q2)
[-0.24253563 0.9701425 ]
直角マークを描画するための座標を作成します。
# 直角マークの座標を計算 r = 0.2 rightangle_q1q2_arr = np.array( [[r*q2[0], r*(q2[0]+q1[0]), r*q1[0]], [r*q2[1], r*(q2[1]+q1[1]), r*q1[1]]] ) print(rightangle_q1q2_arr)
[[-0.04850713 0.14552138 0.1940285 ]
[ 0.1940285 0.24253563 0.04850713]]
原点の座標から、1つ目の正規直交ベクトル方向と2つ目の正規直交ベクトル
方向に少しずつ移動した点の座標を配列に格納します。
正規直交ベクトルのグラフを作成します。
# 2Dの正規直交ベクトルを作図 fig, ax = plt.subplots(figsize=(8, 6), facecolor='white') ax.plot(*line_arr, color='red', linestyle=':', zorder=0) # 直線a1 ax.quiver(0, 0, *q1, color='hotpink', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$q_1=('+', '.join(map(str, q1.round(2)))+')$') # 正規化ベクトルq1 ax.quiver(0, 0, *q2, color='chocolate', width=0.01, headwidth=4, headlength=5, angles='xy', scale_units='xy', scale=1, label='$q_2=('+', '.join(map(str, q2.round(2)))+')$') # 正規化垂線ベクトルq2 ax.quiver(0, 0, *tilde_q2, fc='none', ec='chocolate', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1, label='$\\tilde{q}_2=('+', '.join(map(str, tilde_q2.round(2)))+')$') # 未正規化垂線ベクトルq2 ax.quiver(*p, *tilde_q2, fc='none', ec='chocolate', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1) # 未正規化垂線ベクトルq2 ax.quiver(0, 0, *p, fc='none', ec='orange', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1, label='$p=('+', '.join(map(str, p.round(2)))+')$') # 正射影ベクトルp ax.quiver(*tilde_q2, *p, fc='none', ec='orange', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1) # 正射影ベクトルp ax.quiver(0, 0, *a2, fc='none', ec='blue', ls='--', lw=1.0, width=0.001, headwidth=40, headlength=50, angles='xy', scale_units='xy', scale=1, label='$a_2=('+', '.join(map(str, a2))+')$') # ベクトルa2 ax.plot(*rightangle_q1q2_arr, color='black', linewidth=1) # 直角マーク ax.plot(*rightangle_pq2_arr, color='black', linewidth=1) # 直角マーク ax.text(*0.5*q1, s='$q_1$', size=15, ha='center', va='top') # 正規化ベクトルq1ラベル ax.text(*0.5*q2, s='$q_2$', size=15, ha='right', va='center') # 正規化ベクトルq2ラベル ax.text(*0.5*p, s='$p = (q_1 \cdot a_2) q_1$', size=15, ha='left', va='top') # 正射影ベクトルpラベル ax.text(*0.5*(a2+p), s='$\\tilde{q}_2 = a_2-p$', size=15, ha='left', va='center') # 未正規化垂線ベクトルq2ラベル ax.set_xticks(ticks=np.arange(x_min, x_max+0.1)) ax.set_yticks(ticks=np.arange(y_min, y_max+0.1)) ax.grid() ax.set_xlabel('$x_1$') ax.set_ylabel('$x_2$') ax.set_title('$\|q_1\|=' + str(np.linalg.norm(q1).round(2)) + ', ' + '\|q_2\|=' + str(np.linalg.norm(q2).round(2)) + ', ' + 'q_1 \cdot q_2=' + str(np.dot(q1, q2).round(2)) + '$', loc='left') fig.suptitle('orthonormal vectors', fontsize=20) ax.legend() ax.set_aspect('equal') plt.show()
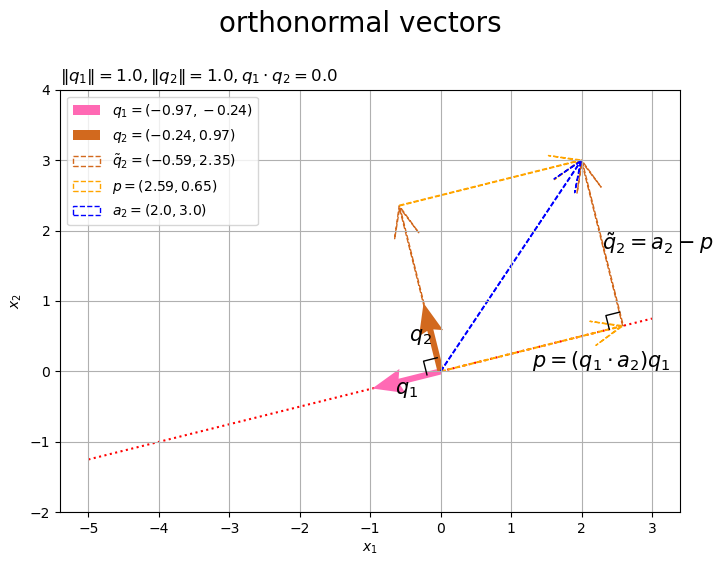
ベクトルを正規化したベクトルを
とします。
は、それぞれノルムが
で、直交します(内積が
になります)。
3次元の場合をこれから書きます…
この記事では、グラム・シュミット法の計算式を導出しました。次の記事では、グラム・シュミット法による正規直交化を可視化します。
参考書籍
- Stephen Boyd・Lieven Vandenberghe(著),玉木 徹(訳)『スタンフォード ベクトル・行列からはじめる最適化数学』講談社サイエンティク,2021年.
おわりに
5章の中では最初に書いた(内容的には次の)記事から1か月以上かかってしまいましたが、この記事で5章完了です。
2023年5月5日は、私立恵比寿中学のメジャーデビュー11周年&ココユノノカ加入2周年の日です!!!
エビ中の魅力に気付いてまだ1年未満の新参で絶賛ハマってる途中ですが、これからも楽しみです🦐
【次の内容】