はじめに
『スタンフォード ベクトル・行列からはじめる最適化数学』の学習ノートです。
「数式の行間埋め」や「Pythonを使っての再現」によって理解を目指します。本と一緒に読んでください。
この記事は7.1節「幾何変換」の内容です。
直線に対するベクトルの鏡映の計算を確認して、グラフを作成します。
【前の内容】
【他の内容】
【今回の内容】
ベクトルの鏡映の可視化
行列計算によるベクトルの直線への鏡映(vector reflection)を数式とグラフで確認します。
行列とベクトルの積については「【Python】行列のベクトル積の可視化【『スタンフォード線形代数入門』のノート】 - からっぽのしょこ」を参照してください。
利用するライブラリを読み込みます。
# 利用ライブラリ import numpy as np import matplotlib.pyplot as plt from matplotlib.animation import FuncAnimation
ベクトルの鏡映の計算式
まずは、ベクトルの鏡映を数式で確認します。
行列
を用いて、2次元ベクトル を変換します。
も2次元ベクトルになります。
ベクトルの鏡映の作図
次は、ベクトルの鏡映をグラフで確認します。
角度を指定して、鏡映用の行列を作成します。
# 角度(ラジアン)を指定 theta = 5.0/6.0 * np.pi print(theta) # 弧度法の角度 print(theta * 180.0/np.pi) # 度数法の角度 # 鏡映行列を作成 A = np.array( [[np.cos(2.0 * theta), np.sin(2.0 * theta)], [np.sin(2.0 * theta), -np.cos(2.0 * theta)]] ) print(A) print(A.shape)
2.6179938779914944
150.00000000000003
[[ 0.5 -0.8660254]
[-0.8660254 -0.5 ]]
(2, 2)
水平線(x軸線の正の部分)からの角度(ラジアン) をスカラ
theta として値を指定します。
鏡映行列 を2次元配列
A として計算します。
ベクトルを指定して、行列との積により変換します。
# ベクトルを指定 x = np.array([-2.0, 3.0]) print(x) print(x.shape) # ベクトルを変換 y = np.dot(A, x) print(y) print(y.shape)
[-2. 3.]
(2,)
[-3.59807621 0.23205081]
(2,)
入力ベクトル を1次元配列
x として値を指定します。
鏡映ベクトル(出力ベクトル) を計算して
y とします。
傾いた直線を描画するための座標を作成します。
# グラフサイズ用の値を設定 x1_min = np.floor(np.min([0.0, x[0], y[0]])) - 2 x1_max = np.ceil(np.max([0.0, x[0], y[0]])) + 2 x2_min = np.floor(np.min([0.0, x[1], y[1]])) - 1 x2_max = np.ceil(np.max([0.0, x[1], y[1]])) + 1 # 傾いた直線の座標を計算 x_vals = np.linspace(start=x1_min, stop=x1_max, num=101) line_arr = np.array( [x_vals, np.sin(theta)/np.cos(theta) * x_vals] ) print(line_arr[:, :5])
[[-6. -5.92 -5.84 -5.76 -5.68 ]
[ 3.46410162 3.41791359 3.37172557 3.32553755 3.27934953]]
原点を通り水平から 傾いた直線の傾きは
で求まります。x軸の値
x_vals を作成して、y軸の値 を計算します。
・装飾用の作図コード(クリックで展開)
直角マークと垂線ラベルを描画するための座標を作成します。
# 傾いた直線上の単位ベクトルを作成 e_p = np.array([np.cos(theta), np.sin(theta)]) print(e_p) # 正射影ベクトルを計算 p = np.dot(e_p, x) * e_p print(p) # 垂線ベクトルを計算 z = x - p print(z) # ベクトルを正規化 e_z = z / np.linalg.norm(z) print(e_z) # 直角マークの座標を計算 r = 0.2 rightangle_mark_arr = np.array( [[p[0]+r*e_z[0], p[0]+r*(e_z[0]-e_p[0]), p[0]-r*e_p[0]], [p[1]+r*e_z[1], p[1]+r*(e_z[1]-e_p[1]), p[1]-r*e_p[1]]] ) print(rightangle_mark_arr) # 垂線ラベル用のラジアンを計算 sgn_p = 1.0 if p[1] >= 0.0 else -1.0 prepend_rad_val = sgn_p * np.arccos(p[0] / np.linalg.norm(p)) # 垂線ラベルの座標を計算 prepend_label_arr = np.median( [[x, p], [y, p]], axis=1 ) print(prepend_label_arr)
[-0.8660254 0.5 ]
[-2.79903811 1.6160254 ]
[0.79903811 1.3839746 ]
[0.5 0.8660254]
[[-2.69903811 -2.52583302 -2.62583302]
[ 1.78923048 1.68923048 1.5160254 ]]
[[-2.39951905 2.3080127 ]
[-3.19855716 0.92403811]]
水平から 傾いた直線と平行な単位ベクトル(傾いた直線上の原点からのノルムが1の点)
を
e_p として作成します。
を用いて、傾いた直線に対するベクトル
の正射影ベクトル
を作成します。詳しくは「【Python】5.3:正射影ベクトルの可視化【『スタンフォード線形代数入門』のノート】 - からっぽのしょこ」を参照してください。
点 の座標から、正射影ベクトル
と垂線ベクトル
の方向にそれぞれ少しずつ移動した点の座標を配列に格納します。
傾いた直線上の点 と2つの点
それぞれの中点に垂線ラベルを配置します。
に応じて、ラベルの表示角度(ラジアン)
prepend_rad_val を作成しておきます。
垂線(点 を結ぶ線分)は作図時に直接指定します。
傾きを示す角度マークと角度ラベルを描画するための座標を作成します。
# 角度マーク用のラジアンを作成 slope_rad_vals = np.linspace(start=0.0, stop=theta, num=100) # 角度マークの座標を計算 r = 0.3 slope_mark_arr = np.array( [r * np.cos(slope_rad_vals), r * np.sin(slope_rad_vals)] ) print(slope_mark_arr[:, :5]) # 角度ラベルの座標を計算 r = 0.45 slope_label_vec = np.array( [r * np.cos(0.5 * theta), r * np.sin(0.5 * theta)] ) print(slope_label_vec)
[[0.3 0.29989511 0.29958051 0.29905643 0.29832323]
[0. 0.00793239 0.01585923 0.02377499 0.03167412]]
[0.11646857 0.43466662]
x軸線の正の部分(原点と点 を結ぶ線分)から、中心角が
の円弧の座標を計算します。円弧の中点にラベルを配置します。
詳しくは「【Python】円周上の点とx軸を結ぶ円弧を作図したい - からっぽのしょこ」を参照してください。
なす角を示す角度マークと角度ラベルを描画するための座標を作成します。
# 入力・出力ベクトルとx軸のなす角を計算 sgn_x = 1.0 if x[1] >= 0.0 else -1.0 theta_x = sgn_x * np.arccos(x[0] / np.linalg.norm(x)) sgn_y = 1.0 if y[1] >= 0.0 else -1.0 theta_y = sgn_y * np.arccos(y[0] / np.linalg.norm(y)) # 角度の差が優角なら負の角度を優角に変換 if abs(theta_x - theta_y) > np.pi: theta_x = theta_x if theta_x >= 0.0 else theta_x + 2.0*np.pi theta_y = theta_y if theta_y >= 0.0 else theta_y + 2.0*np.pi # 角度マーク用のラジアンを作成 angle_rad_vals = np.linspace(start=theta_x, stop=theta_y, num=100) # 角度マークの座標を計算 r = 0.6 angle_mark_arr = np.array( [r * np.cos(angle_rad_vals), r * np.sin(angle_rad_vals)] ) print(angle_mark_arr[:, :5]) # 角度ラベル用のラジアンを作成 theta_med = np.median(angle_rad_vals) angle_rad_vec = np.array( [np.median([theta_med, theta_x]), np.median([theta_med, theta_y])] ) print(angle_rad_vec) # 角度ラベルの座標を計算 r = 0.6 angle_label_arr = np.array( [r * np.cos(angle_rad_vec), r * np.sin(angle_rad_vec)] ) print(angle_label_arr)
[[-0.33282012 -0.33743692 -0.34202469 -0.34658302 -0.35111153]
[ 0.49923018 0.49612128 0.49296969 0.48977567 0.48653951]]
[2.3883964 2.84759135]
[[-0.43770387 -0.57425522]
[ 0.41038436 0.17387049]]
ベクトル を結ぶ円弧の座標を計算します。傾いた直線と2つのベクトルそれぞれの中点にラベルを配置します。
詳しくは「【Python】円周上の2点を結ぶ円弧を作図したい - からっぽのしょこ」を参照してください。
ベクトル のグラフを作成します。
# 2D鏡映ベクトルを作図 fig, ax = plt.subplots(figsize=(8, 6), facecolor='white') ax.quiver(0, 0, *x, color='black', units='dots', width=5, headwidth=5, angles='xy', scale_units='xy', scale=1, label='$x=({}, {})'.format(*x)+'$') # 入力ベクトル ax.quiver(0, 0, *y, color='red', units='dots', width=5, headwidth=5, angles='xy', scale_units='xy', scale=1, label='$y=({:.2f}, {:.2f})'.format(*y)+'$') # 出力ベクトル ax.plot(*line_arr) # 傾いた直線 ax.hlines(y=0.0, xmin=0.0, xmax=x1_max, linestyle='--') # 水平線 ax.plot([x[0], y[0]], [x[1], y[1]], color='black', linestyle='--') # 垂線 ax.plot(*rightangle_mark_arr, color='black', linewidth=1) # 直角マーク ax.plot(*slope_mark_arr, color='black', linewidth=1) # 傾き角度マーク ax.text(*slope_label_vec, s='$\\theta$', size=15, ha='center', va='center') # 傾き角度ラベル ax.plot(*angle_mark_arr, color='red', linewidth=1) # なす角マーク for i in range(2): ax.annotate(xy=angle_label_arr.T[i], text='|', size=10, rotation=angle_rad_vec[i]*180.0/np.pi+90.0, ha='center', va='center') # なす角ラベル ax.annotate(xy=prepend_label_arr[i], text='||', size=10, rotation=prepend_rad_val*180.0/np.pi+90.0, ha='center', va='center') # 垂線ラベル ax.set_xticks(ticks=np.arange(x1_min, x1_max+1)) ax.set_yticks(ticks=np.arange(x2_min, x2_max+1)) ax.set_xlim(left=x1_min, right=x1_max) ax.set_ylim(bottom=x2_min, top=x2_max) ax.set_xlabel('$x_1$') ax.set_xlabel('$x_1$') ax.set_ylabel('$x_2$') ax.set_title('$y = A x, ' + '\\theta = {:.2f} \pi'.format(theta/np.pi)+', ' + 'A = ('+', '.join(['{:.2f}'.format(a) for a in A.flatten()])+')$', loc='left') fig.suptitle('reflection', fontsize=20) ax.grid() ax.legend() ax.set_aspect('equal') plt.show()
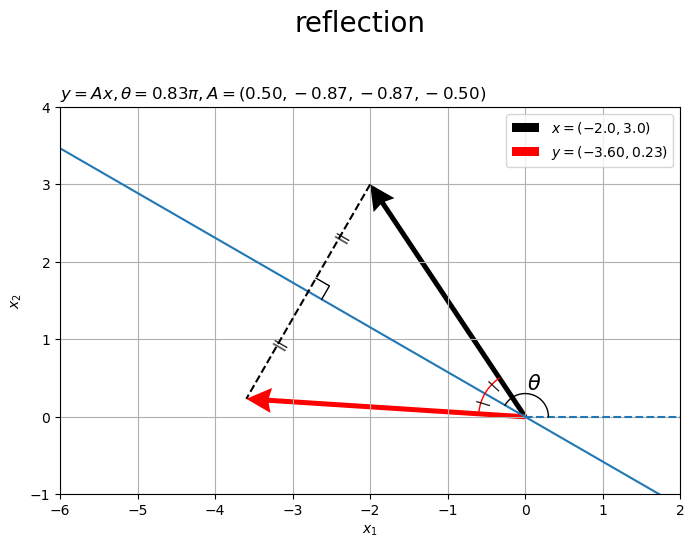
水平(水色の破線)から反時計回りに 傾いた直線(水色の実線)を直線
と呼ぶことにします。入力ベクトル
を黒色の矢印、出力ベクトルを
を赤色の矢印で示します。
行列 によって変換したベクトル
が、直線
に対して
を反転させたベクトルなのが分かります。
点 を通る直線(黒色の破線)が、直線
と垂直に交わります。また、直線
は、ベクトル
のなす角、線分
それぞれの中点を通ります。
角度(直線の傾き)または入力ベクトルを変化させたアニメーションで確認します。
・作図コード(クリックで展開)
フレーム数を指定して、変化する角度と固定する入力ベクトルを作成します。
# フレーム数を指定 frame_num = 180 # 角度(ラジアン)の範囲を指定 theta_n = np.linspace(start=-2.0*np.pi, stop=2.0*np.pi, num=frame_num+1)[:frame_num] print(theta_n[:5]) # ベクトルを指定 x = np.array([-2.0, 3.0])
[-6.28318531 -6.21337214 -6.14355897 -6.0737458 -6.00393263]
フレーム数を frame_num として整数を指定します。
ラジアンの範囲を指定して、frame_num 個のラジアン theta_n を作成します。入力ベクトル x は先ほどと同様に指定します。
範囲を にして
frame_num + 1 個の等間隔の値を作成して最後の値を除くと、最後のフレームと最初のフレームがスムーズに繋がります。
または、固定する角度と変化する入力ベクトルを作成します。
# フレーム数を指定 #frame_num = 90 # 角度(ラジアン)を指定 theta = 5.0/6.0 * np.pi # ベクトルとして用いる値を指定 r = 3.0 rad_n = np.linspace(start=0.0, stop=2.0*np.pi, num=frame_num+1)[:frame_num] x_n = np.array( [r * np.cos(rad_n), r * np.sin(rad_n)] ).T print(x_n[:5])
[[3. 0. ]
[2.99269215 0.20926942]
[2.97080421 0.4175193 ]
[2.9344428 0.62373507]
[2.88378509 0.82691207]]
frame_num 個の入力ベクトル x_nを作成します。ラジアン theta は先ほどと同様に指定します。
この例では、入力ベクトル(の先端)が原点からの半径が r の円周上を移動するように設定しています。
角度と入力ベクトルの両方を変化させることもできます。
アニメーションを作成します。
# グラフサイズ用の値を設定 axis_size = np.ceil(abs(x).max()) + 1 #axis_size = np.ceil(abs(x_n).max()) + 1 # グラフオブジェクトを初期化 fig, ax = plt.subplots(figsize=(8, 8), facecolor='white') fig.suptitle('reflection', fontsize=20) # 作図処理を関数として定義 def update(i): # 前フレームのグラフを初期化 plt.cla() # i番目の値を作成 theta = theta_n[i] #x = x_n[i] # 鏡映行列を作成 A = np.array( [[np.cos(2.0 * theta), np.sin(2.0 * theta)], [np.sin(2.0 * theta), -np.cos(2.0 * theta)]] ) # ベクトルを変換 y = np.dot(A, x) # 傾いた直線の座標を計算 x_vals = np.linspace(start=-axis_size, stop=axis_size, num=101) line_arr = np.array( [x_vals, np.sin(theta)/np.cos(theta) * x_vals] ) # 直角マークの座標を計算 r = 0.3 e_p = np.array([np.cos(theta), np.sin(theta)]) # 単位正射影ベクトル p = np.dot(e_p, x) * e_p e_z = (x - p) / np.linalg.norm(x - p) # 単位垂線ベクトル rightangle_mark_arr = np.array( [[p[0]+r*e_z[0], p[0]+r*(e_z[0]-e_p[0]), p[0]-r*e_p[0]], [p[1]+r*e_z[1], p[1]+r*(e_z[1]-e_p[1]), p[1]-r*e_p[1]]] ) # 垂線ラベル用のラジアンを計算 sgn_p = 1.0 if p[1] >= 0.0 else -1.0 prepend_rad_val = sgn_p * np.arccos(p[0] / np.linalg.norm(p)) # 垂線ラベルの座標を計算 prepend_label_arr = np.median( [[x, p], [y, p]], axis=1 ) # 角度マークの座標を計算 r = 0.3 slope_rad_vals = np.linspace(start=0.0, stop=theta, num=100) slope_mark_arr = np.array( [r * np.cos(slope_rad_vals), r * np.sin(slope_rad_vals)] ) # 角度ラベルの座標を計算 r = 0.5 slope_label_vec = np.array( [r * np.cos(0.5 * theta), r * np.sin(0.5 * theta)] ) # 入力・出力ベクトルとx軸のなす角を計算 sgn_x = 1.0 if x[1] >= 0.0 else -1.0 theta_x = sgn_x * np.arccos(x[0] / np.linalg.norm(x)) sgn_y = 1.0 if y[1] >= 0.0 else -1.0 theta_y = sgn_y * np.arccos(y[0] / np.linalg.norm(y)) # 角度の差が優角なら負の角度を優角に変換 if abs(theta_x - theta_y) > np.pi: theta_x = theta_x if theta_x >= 0.0 else theta_x + 2.0*np.pi theta_y = theta_y if theta_y >= 0.0 else theta_y + 2.0*np.pi # 角度マークの座標を計算 r = 0.6 angle_rad_vals = np.linspace(start=theta_x, stop=theta_y, num=100) angle_mark_arr = np.array( [r * np.cos(angle_rad_vals), r * np.sin(angle_rad_vals)] ) # 角度ラベル用のラジアンを作成 theta_med = np.median(angle_rad_vals) angle_rad_vec = np.array( [np.median([theta_med, theta_x]), np.median([theta_med, theta_y])] ) # 角度ラベルの座標を計算 angle_label_arr = np.array( [r * np.cos(angle_rad_vec), r * np.sin(angle_rad_vec)] ) # 2D鏡映ベクトルを作図 ax.quiver(0, 0, *x, color='black', units='dots', width=5, headwidth=5, angles='xy', scale_units='xy', scale=1, label='$x=({: .2f}, {: .2f})'.format(*x)+'$') # 入力ベクトル ax.quiver(0, 0, *y, color='red', units='dots', width=5, headwidth=5, angles='xy', scale_units='xy', scale=1, label='$y=({: .2f}, {: .2f})'.format(*y)+'$') # 出力ベクトル ax.plot(*line_arr) # 傾いた直線 ax.hlines(y=0.0, xmin=0.0, xmax=axis_size, linestyle='--') # 水平線 ax.plot([x[0], y[0]], [x[1], y[1]], color='black', linestyle='--') # 垂線 ax.plot(*rightangle_mark_arr, color='black', linewidth=1) # 直角マーク ax.plot(*slope_mark_arr, color='black', linewidth=1) # 傾き角度マーク ax.text(*slope_label_vec, s='$\\theta$', size=15, ha='center', va='center') # 傾き角度ラベル ax.plot(*angle_mark_arr, color='red', linewidth=1) # なす角マーク for i in range(2): ax.annotate(xy=angle_label_arr.T[i], text='|', size=10, rotation=angle_rad_vec[i]*180.0/np.pi+90.0, ha='center', va='center') # なす角ラベル ax.annotate(xy=prepend_label_arr[i], text='||', size=10, rotation=prepend_rad_val*180.0/np.pi+90.0, ha='center', va='center') # 垂線ラベル ax.set_xticks(ticks=np.arange(-axis_size, axis_size+1)) ax.set_yticks(ticks=np.arange(-axis_size, axis_size+1)) ax.set_xlim(left=-axis_size, right=axis_size) ax.set_ylim(bottom=-axis_size, top=axis_size) ax.set_xlabel('$x_1$') ax.set_ylabel('$x_2$') ax.set_title('$y = A x, ' + '\\theta = {: .2f} \pi, '.format(theta/np.pi)+', ' + 'A = ('+', '.join(['{: .2f}'.format(a) for a in A.flatten()])+')$', loc='left') ax.grid() ax.legend(loc='upper left') ax.set_aspect('equal') # gif画像を作成 ani = FuncAnimation(fig=fig, func=update, frames=frame_num, interval=100) # gif画像を保存 ani.save('reflection.gif')
作図処理をupdate()として定義して、FuncAnimation()でgif画像を作成します。
角度が負の値 だと右回りに傾きます。
この記事では、行列計算によるベクトルの鏡映を確認しました。次の記事では、を確認します。
参考書籍
- Stephen Boyd・Lieven Vandenberghe(著),玉木 徹(訳)『スタンフォード ベクトル・行列からはじめる最適化数学』講談社サイエンティク,2021年.
おわりに
射影よりも鏡映の方がややこしかったというか、半分射影が含まれていたので順番を入れ替えました。
いつものように装飾用の作図処理が盛りもりですが普通に読み飛ばしてください。ただ装飾にも過去に勉強した数学の内容を使う必要があって、それが新しい内容の理解の助けになる感じが少年マンガ展開っぽくて良いです。
【次の内容】
つづく