はじめに
『パターン認識と機械学習』の独学時のまとめです。一連の記事は「数式の行間埋め」または「R・Pythonでの実装」からアルゴリズムの理解を補助することを目的としています。本とあわせて読んでください。
この記事は、3.1.4項「正則化最小二乗法」の内容です。ラッソ回帰(Lasso回帰)を導出します。
【実装編】
www.anarchive-beta.com
www.anarchive-beta.com
【前節の内容】
www.anarchive-beta.com
【他の節一覧】
www.anarchive-beta.com
【この節の内容】
3.1.4 ラッソ回帰の導出
過学習を防ぐために線形基底関数モデルに正則化項を導入します。線形基底関数モデルについては「3.1.1:最尤推定と最小二乗法の導出【PRMLのノート】 - からっぽのしょこ」を参照してください。
・モデルの設定
これまでは、二乗和誤差関数$E_D(\mathbf{w})$を最小化(尤度関数を最大化)するパラメータ$\mathbf{w}$を考えました。
$$
E_D(\mathbf{w})
= \frac{1}{2}
\sum_{n-1}^N \Bigl\{
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr\}^2
\tag{3.26}
$$
ここで、入力変数$\mathbf{X} = \{\mathbf{x}_1, \mathbf{x}_2, \cdots, \mathbf{x}_N\}$、$\mathbf{x}_n = (x_{n,1}, x_{n,2}, \cdots, x_{n,D})^{\top}$、目標値$\mathbf{t} = \{t_1, t_2, \cdots, t_N\}$、基底関数$\boldsymbol{\phi}(\mathbf{x}_n) = (\phi_0(\mathbf{x}_n), \phi_1(\mathbf{x}_n), \cdots, \phi_{M-1}(\mathbf{x}_n))^{\top}$、重みパラメータ$\mathbf{w} = (w_0, w_1, \cdots, w_{M-1})^{\top}$です。ただし、$\phi_0(\mathbf{x}) = 1$とすることで$w_0 = w_0 \phi_0(\mathbf{x})$とし、$w_0$をバイアスと呼びます。
正則化最小二乗法では、正則化項$E_W(\mathbf{w})$を導入します。
$$
E_W(\mathbf{w})
= \frac{1}{q}
\sum_{j=0}^{M-1}
|w_j|^q
$$
$|w_j|$は$w_j$の絶対値です。
二乗和誤差$E_D(\mathbf{w})$に正則化項$E_W(\mathbf{w})$を加えたものを誤差関数$E(\mathbf{w})$とします。
$$
\begin{align}
E(\mathbf{w})
&= E_D(\mathbf{w})
+ \lambda E_W(\mathbf{w})
\tag{3.24}\\
&= \frac{1}{2}
\sum_{n-1}^N \Bigl\{
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr\}^2
+ \frac{\lambda}{q}
\sum_{j=0}^{M-1}
|w_j|^q
\tag{3.29}
\end{align}
$$
ここで、$\lambda$は正則化項の影響を調整する正則化係数です。
誤差関数に正則化項を含めることで、誤差を小さくしつつパラメータの値も小さくすることが期待できます。
・ラッソ回帰の最尤解の導出
$q = 1$の場合、正則化項がL1ノルムになります。このとき、ラッソ回帰(Lasso回帰)またはL1正則化と呼びます。L1ノルムについては「【R】3.1.4.0:Lpノルムの作図【PRMLのノート】 - からっぽのしょこ」を参照してください。
$q = 1$のとき、正則化項はL1ノルム$\|\mathbf{w}\|_1$になります。
$$
E_W(\mathbf{w})
= \sum_{j=0}^{M-1}
|w_j|
= \|\mathbf{w}\|_1
$$
よって、誤差関数は
$$
\begin{align}
E_{\mathrm{Lasso}}(\mathbf{w})
&= E_D(\mathbf{w})
+ \lambda E_W(\mathbf{w})
\tag{3.24}\\
&= \frac{1}{2}
\sum_{n-1}^N \Bigl\{
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr\}^2
+ \lambda
\sum_{j=0}^{M-1}
|w_j|
\\
&= \frac{1}{2}
\sum_{n-1}^N \Bigl\{
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr\}^2
+ \lambda
\sum_{j=0}^{M-1}
|w_j|
\tag{1}
\end{align}
$$
となります。バイアスパラメータ$w_0$を正則化項に含めない場合については、最後に扱います。
誤差関数(1)を最小化する重みパラメータ$\mathbf{w}_{\mathrm{Lasso}}$(の各項)を求めます。
$w_k$に関して誤差関数を微分します。
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
&= \frac{\partial}{\partial w_k} \Bigl\{
E_D(\mathbf{w})
+ \lambda E_W(\mathbf{w})
\Bigr\}
\\
&= \frac{\partial}{\partial w_k}
E_D(\mathbf{w})
+ \lambda
\frac{\partial}{\partial w_k}
E_W(\mathbf{w})
\end{aligned}
$$
この式を具体的な式に置き替えると次のようになります。
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
&= \frac{\partial}{\partial w_k} \left\{
\frac{1}{2}
\sum_{n=1}^N \Bigl(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
+ \lambda
\sum_{j=0}^{M-1}
|w_j|
\right\}
\\
&= \frac{1}{2}
\frac{\partial}{\partial w_k} \left\{
\sum_{n=1}^N \Bigl(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
\right\}
+ \lambda
\frac{\partial}{\partial w_k} \left\{
\sum_{j=0}^{M-1}
|w_j|
\right\}
\end{aligned}
$$
二乗和誤差関数の微分は、合成関数の微分により
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_D(\mathbf{w})
&= \frac{1}{2}
\frac{\partial}{\partial w_k} \left\{
\sum_{n=1}^N \Bigl(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
\right\}
\\
&= \sum_{n=1}^N \Bigl(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)
\frac{\partial}{\partial w_k} \left\{
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right\}
\end{aligned}
$$
となります。全体を$g(f(x))$、丸括弧を$f(x)$に対応させて、合成関数の微分$\{g(f(x))\}' = g'(f(x)) f'(x)$を行っています。さらに、後の項は
$$
\begin{aligned}
\frac{\partial}{\partial w_k} \left\{
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right\}
&= \frac{\partial}{\partial w_k} \left\{
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right\}
\\
&= \frac{\partial}{\partial w_k} \left\{
t_n
- w_k \phi_k(\mathbf{x}_n)
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right\}
\\
&= \frac{\partial}{\partial w_k}
t_n
- \frac{\partial}{\partial w_k}
w_k \phi_k(\mathbf{x}_n)
- \frac{\partial}{\partial w_k}
\sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\\
&= 0 - \phi_k(\mathbf{x}_n) + 0
\\
&= - \phi_k(\mathbf{x}_n)
\end{aligned}
$$
$w_k$に関する項のみ残ります。1行目から2行目では、$j = 0, 1, \cdots, M - 1$から$k$番目の項を取り出しています。よって
$$
\frac{\partial}{\partial w_k}
E_D(\mathbf{w})
= - \sum_{n=1}^N \left(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
$$
となります。
正則化項の微分についても
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_W(\mathbf{w})
&= \frac{\partial}{\partial w_k} \left\{
\sum_{j=1}^M
|w_j|
\right\}
\\
&= \frac{\partial}{\partial w_k} \Bigl\{
|w_1| + \cdots + |w_k| + \cdots + |w_M|
\Bigr\}
\\
&= \frac{\partial}{\partial w_k} |w_1|
+ \cdots
+ \frac{\partial}{\partial w_k} |w_k|
+ \cdots
+ \frac{\partial}{\partial w_k} |w_M|
\\
&= 0 + \cdots + \frac{\partial}{\partial w_k} |w_k| + \cdots + 0
\\
&= \frac{\partial}{\partial w_k} |w_k|
\end{aligned}
$$
$w_k$に関する項が残ります。
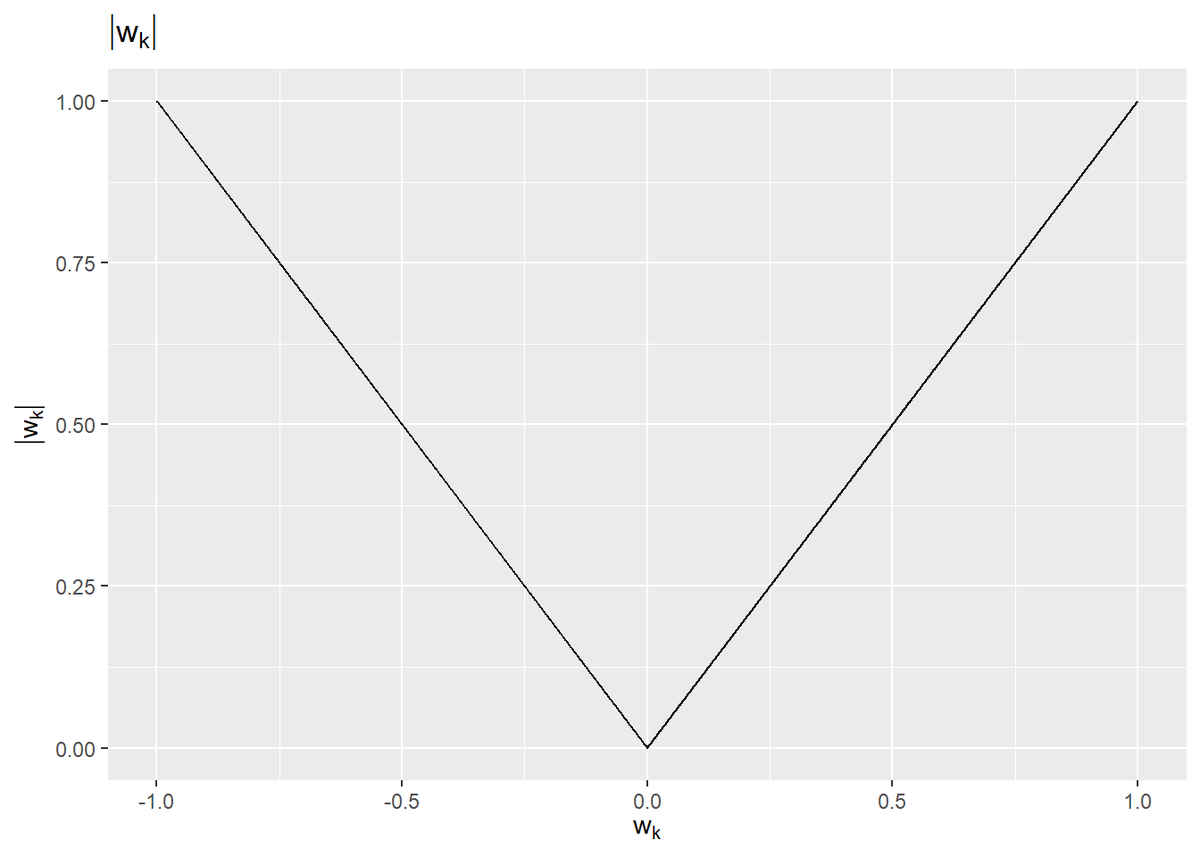
絶対値について
$$
|w_k|
= \begin{cases}
w_k &\quad (w_k > 0) \\
- w_k &\quad (w_k < 0)
\end{cases}
$$
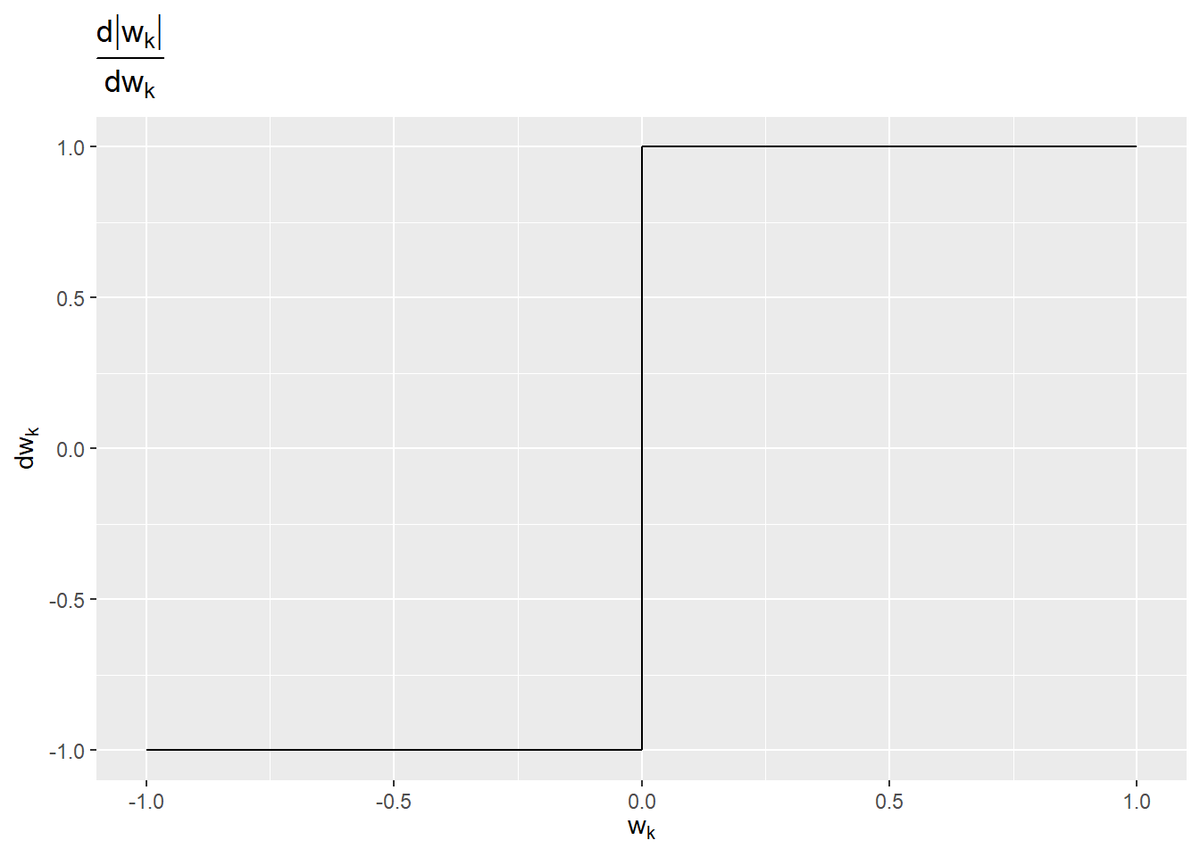
なので、絶対値の微分は
$$
\frac{\partial}{\partial w_k}
E_W(\mathbf{w})
= \frac{\partial}{\partial w_k}
|w_k|
= \begin{cases}
1 &\quad (w_k > 0) \\
[-1, 1] &\quad(w_k = 0) \\
- 1 &\quad (w_k < 0)
\end{cases}
$$
です。$w_k = 0$のとき、-1から1の値になります。$[-1, 1]$で-1から1を表します。これを劣微分と言います(よく分かってないので解説は省略)。
グラフで確認しましょう。
・作図コード(クリックで展開)
library(tidyverse)
library(gganimate)
df <- tidyr::tibble(
w = seq(-1, 1, by = 0.001),
abs_w = abs(w),
dw = dplyr::if_else(w < 0, true = -1, false = 1)
)
ggplot(df, aes(x = w, y = abs_w)) +
geom_line() +
labs(title = expression(group("|", w[k], "|")),
x = expression(w[k]), y = expression(group("|", w[k], "|")))
ggplot(df, aes(x = w, y = dw)) +
geom_line() +
labs(title = expression(frac(d * group("|", w[k], "|"), d * w[k])),
x = expression(w[k]), y = expression(d * w[k]))
df <- tidyr::tibble(
w = seq(-1, 1, by = 0.01),
abs_w = abs(w)
)
anime_df <- tidyr::tibble()
for(tmp_w in seq(- 1, 1, by = 0.01)) {
if(tmp_w != 0){
tmp_df <- df %>%
dplyr::mutate(
tangent_point_w = tmp_w,
tangent_point_y = abs(tmp_w),
dw = dplyr::case_when(
tmp_w > 0 ~ 1,
tmp_w < 0 ~ -1
),
tangent_line_y = dplyr::case_when(
tmp_w > 0 ~ w,
tmp_w < 0 ~ -w
),
label = paste0("w=", round(tmp_w, 2), ", dw=", dw) %>%
as.factor()
)
anime_df <- rbind(anime_df, tmp_df)
} else if(tmp_w == 0) {
for(tmp_dw in seq(-1, 1, by = 0.01)) {
tmp_df <- df %>%
dplyr::mutate(
tangent_point_w = tmp_w,
tangent_point_y = abs(tmp_w),
dw = tmp_dw,
tangent_line_y = tmp_dw * w,
label = paste0("w=", round(tmp_w, 2), ", dw=", round(tmp_dw, 2)) %>%
as.factor()
)
anime_df <- rbind(anime_df, tmp_df)
}
}
}
anime_graph <- ggplot(anime_df, aes(x = w)) +
geom_line(aes(y = abs_w)) +
geom_point(aes(x = tangent_point_w, y = tangent_point_y), color = "red") +
geom_line(aes(y = tangent_line_y), color = "purple", linetype = "dashed") +
gganimate::transition_manual(label) +
ylim(c(-0.5, 1)) +
labs(title = "Tangent Line",
subtitle = paste0("{current_frame}"),
x = expression(w[k]), y = expression(group("|", w[k], "|")))
gganimate::animate(anime_graph, nframes = length(unique(anime_df[["label"]])), fps = 25)
絶対値の微分のグラフ
左の図は絶対値のグラフです。
中の図は絶対値の微分のグラフです。$w_k = 0$においてy軸が-1から1になっているのが劣微分に対応しています。
右の図は絶対値のグラフに対する接線です。$w_k < 0,\ w_k > 0$では接線の傾き(微分)がそれぞれ$- 1,\ 1$で固定で、$w_k = 0$では$[-1, 1]$の範囲で変化するのを確認できます。この値の変化が中の図に対応しています。
よって、誤差関数の微分は
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
&= \frac{\partial}{\partial w_k}
E_D(\mathbf{w})
+ \lambda
\frac{\partial}{\partial w_k}
E_W(\mathbf{w})
\\
&= \begin{cases}
- \sum_{n=1}^N
\Bigl(
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr)
\phi_k(\mathbf{x}_n)
+ \lambda
&\quad (w_k > 0) \\
- \sum_{n=1}^N
\Bigl(
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr)
\phi_k(\mathbf{x}_n)
+ [- \lambda, \lambda]
&\quad (w_k = 0) \\
- \sum_{n=1}^N
\Bigl(
t_n - \mathbf{w}^{\top} \boldsymbol{\phi}(\mathbf{x}_n)
\Bigr)
\phi_k(\mathbf{x}_n)
- \lambda
&\quad (w_k < 0)
\end{cases}
\end{aligned}
$$
となり、$w_k$の値によって場合分けして計算する必要があります。
$w_k$に関する損失関数の微分$\frac{\partial}{\partial w_k} E_{\mathrm{Lasso}}(\mathbf{w})$を0とおき、$w_k$について解きます。
まずは、$w_k > 0$の場合を考えます。$k$以外の項を右辺に移項し
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
= - \sum_{n=1}^N
\left(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
+ \lambda
&= 0
\\
\Rightarrow
- \sum_{n=1}^N
\left(
t_n
- w_k \phi_k(\mathbf{x}_n)
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
&= - \lambda
\\
\Rightarrow
w_k
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
&= \sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
- \lambda
\end{aligned}
$$
両辺を$\sum_{n=1}^N \phi_k(\mathbf{x}_n)^2$で割ります。
$$
w_k
= \frac{
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
- \lambda
}{
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
}
\equiv
w_k^{(\mathrm{Lasso})}
\quad (w_k > 0)
\tag{2}
$$
$w_k > 0$における最尤解が得られました。
この式(2)を条件式に代入すると
$$
\begin{aligned}
&w_k
> 0
\\
\Rightarrow&
\frac{
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
- \lambda
}{
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
}
> 0
\\
\Rightarrow&
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
> \lambda
\end{aligned}
$$
となります。
式(2)の分子を見ると、$\sum_{n=1}^N (t_n - \sum_{j \neq k} w_j \phi_j(\mathbf{x}_n)) \phi_k(\mathbf{x}_n)$が$\lambda$より小さいと$w_k$が負の値になり、$w_k > 0$の条件を満たさないことが分かります。この式は、式(2)が成立する条件と言えます。
$w_k < 0$の場合も同様にして
$$
\begin{align}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
=& - \sum_{n=1}^N
\left(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
- \lambda
= 0
\\
&\Rightarrow
w_k
= \frac{
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
+ \lambda
}{
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
}
\equiv
w_k^{(\mathrm{Lasso})}
\quad (w_k < 0)
\tag{3}
\end{align}
$$
が得られます。
また
$$
\begin{aligned}
&w_k
< 0
\\
\Rightarrow&
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
< - \lambda
\end{aligned}
$$
となります。
$w_k = 0$の場合を考えます。
式を分かりやすくするために、$w_k$に影響しない項を$S$とおきます。
$$
S = \sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
$$
$w_k = 0$なので、$w_k$に影響する項は消えてしまいます。
$$
\begin{aligned}
\frac{\partial}{\partial w_k}
E_{\mathrm{Lasso}}(\mathbf{w})
&= - \sum_{n=1}^N
\left(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
+ [- \lambda, \lambda]
\\
&= w_k
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
- S
+ [- \lambda, \lambda]
\\
&= [- S - \lambda, - S + \lambda]
\quad (w_k = 0)
\end{aligned}
$$
これを0とおくと?
$$
\begin{aligned}
&- S - \lambda \leq 0 \leq - S + \lambda
\\
\Rightarrow&
- \lambda \leq S \leq \lambda
\end{aligned}
$$
となる?これは、式(2)(3)が成り立たない範囲と言えます。
この条件の下で
$$
w_k^{(\mathrm{Lasso})}
= 0
\tag{4}
$$
となります。(この部分よく分からない。)
したがって、式(2)から(4)をまとめると
$$
w_k^{(\mathrm{Lasso})}
= \begin{cases}
\frac{S - \lambda}{\sum_{n=1}^N \phi_k(\mathbf{x}_n)^2}
&\quad (S > \lambda) \\
0
&\quad (- \lambda \leq S \leq \lambda) \\
\frac{S + \lambda}{\sum_{n=1}^N \phi_k(\mathbf{x}_n)^2}
&\quad (S < - \lambda) \\
\end{cases}
$$
となります。
ただし
$$
S = \sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
$$
とおきました。
グラフで確認しましょう。
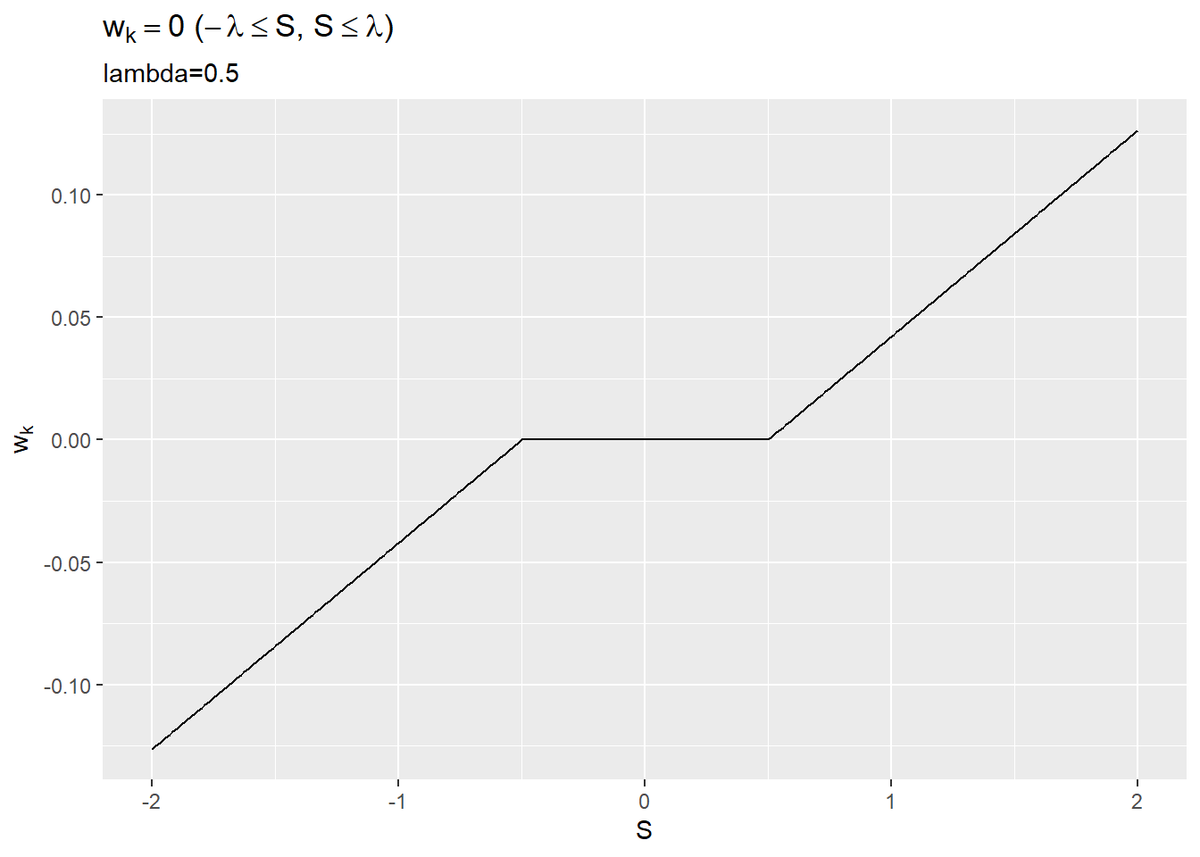 パラメータの値が0になる閾値のグラフ
パラメータの値が0になる閾値のグラフ
平らになっている($w_k = 0$となる)範囲が$- \lambda \leq S \leq \lambda$です。$\lambda$が大きいほど値が0になりやすいのが分かります。また、$S$は観測データの影響を受けるので、観測データによってもグラフの形状が変わります。詳しくは、実装編を参照してください。
・式を整理
式がごちゃごちゃしているので(またプログラム上で計算しやすくするため)行列の積の形に書き替えてみます。
式(2)(3)の分子の項を展開します。
$$
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
= \sum_{n=1}^N
t_n \phi_k(\mathbf{x}_n)
- \sum_{n=1}^N \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n) \phi_k(\mathbf{x}_n)
$$
前の項は、ベクトルの積で表せます。
$$
\begin{aligned}
\sum_{n=1}^N
t_n \phi_k(\mathbf{x}_n)
&= \begin{pmatrix}
t_1 & t_2 & \cdots & t_N
\end{pmatrix}
\begin{pmatrix}
\phi_k(\mathbf{x}_1) \\
\phi_k(\mathbf{x}_2) \\
\vdots \\
\phi_k(\mathbf{x}_N)
\end{pmatrix}
\\
&= \mathsf{t}^{\top} \boldsymbol{\Phi}_k
\end{aligned}
$$
後の項は、2つのベクトルと行列の積で表せます。
$$
\begin{aligned}
\sum_{n=1}^N \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n) \phi_k(\mathbf{x}_n)
&= \begin{pmatrix}
\sum_{j \neq k} w_j \phi_j(\mathbf{x}_1) & \cdots & \sum_{j \neq k} w_j \phi_j(\mathbf{x}_n) & \cdots & \sum_{j \neq k} w_j \phi_j(\mathbf{x}_N)
\end{pmatrix}
\begin{pmatrix}
\phi_k(\mathbf{x}_1) \\
\vdots \\
\phi_k(\mathbf{x}_n) \\
\vdots \\
\phi_k(\mathbf{x}_N)
\end{pmatrix}
\\
&= \begin{pmatrix}
w_0 & \cdots & w_{k-1} & 0 & w_{k+1} & \cdots & w_{M-1}
\end{pmatrix}
\begin{pmatrix}
\phi_0(\mathbf{x}_1) & \cdots & \phi_0(\mathbf{x}_n) & \cdots & \phi_0(\mathbf{x}_N) \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
\phi_k(\mathbf{x}_1) & \cdots & \phi_k(\mathbf{x}_n) & \cdots & \phi_k(\mathbf{x}_N) \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
\phi_{M-1}(\mathbf{x}_1) & \cdots & \phi_{M-1}(\mathbf{x}_n) & \cdots & \phi_{M-1}(\mathbf{x}_N)
\end{pmatrix}
\begin{pmatrix}
\phi_k(\mathbf{x}_1) \\
\vdots \\
\phi_k(\mathbf{x}_n) \\
\vdots \\
\phi_k(\mathbf{x}_N)
\end{pmatrix}
\\
&= \mathbf{w}_{\backslash k}^{\top}
\boldsymbol{\Phi}^{\top}
\boldsymbol{\Phi}_k
\end{aligned}
$$
ただし、$k$番目の要素が0のパラメータを$\mathbf{w}_{\backslash k}$、計画行列$\boldsymbol{\Phi}$の$k$列目を$\boldsymbol{\Phi}_k$とおきました(本当は$k$に関する要素を除くべきですが、0にした方がプログラム上の扱いが楽そうなので)。
また、分母も内積で表せます。
$$
\begin{aligned}
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
&= \begin{pmatrix}
\phi_k(\mathbf{x}_1) & \phi_k(\mathbf{x}_2) & \cdots & \phi_k(\mathbf{x}_N)
\end{pmatrix}
\begin{pmatrix}
\phi_k(\mathbf{x}_1) \\
\phi_k(\mathbf{x}_2) \\
\vdots \\
\phi_k(\mathbf{x}_N)
\end{pmatrix}
\\
&= \boldsymbol{\Phi}_k^{\top} \boldsymbol{\Phi}_k
\end{aligned}
$$
よって、最尤解の計算式(2)は
$$
\begin{align}
w_k^{(\mathrm{Lasso})}
&= \frac{
\sum_{n=1}^N
\left(
t_n
- \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n)
\right)
\phi_k(\mathbf{x}_n)
- \lambda
}{
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
}
\tag{2}\\
&= \frac{
\sum_{n=1}^N
t_n \phi_k(\mathbf{x}_n)
- \sum_{n=1}^N \sum_{j \neq k}
w_j \phi_j(\mathbf{x}_n) \phi_k(\mathbf{x}_n)
- \lambda
}{
\sum_{n=1}^N
\phi_k(\mathbf{x}_n)^2
}
\\
&= \frac{
\mathsf{t}^{\top} \boldsymbol{\Phi}_k
- \mathbf{w}_{\backslash k}^{\top} \boldsymbol{\Phi}^{\top} \boldsymbol{\Phi}_k
- \lambda
}{
\boldsymbol{\Phi}_k^{\top} \boldsymbol{\Phi}_k
}
\\
&= \frac{
\Bigl(
\mathsf{t}^{\top}
- \mathbf{w}_{\backslash k}^{\top} \boldsymbol{\Phi}^{\top}
\Bigr)
\boldsymbol{\Phi}_k
- \lambda
}{
\boldsymbol{\Phi}_k^{\top} \boldsymbol{\Phi}_k
}
\quad (w_k > 0)
\end{align}
$$
と書けます。式(3)についても同様です。
・バイアスを正則化項に含めない場合
バイアス$w_0$を正則化項に含めないことがあるらしい。その場合のバイアスの最尤解$w_0^{(\mathrm{Lasso})}$を考えます。
$w_0$を含めないので、正則化項は
$$
E_W(\mathbf{w}_{\backslash 0})
= |w_1| + |w_2| + \cdots + |w_{M-1}|
= \sum_{j=1}^{M-1}
|w_j|
$$
となります。$w_0$を除く$M - 1$個のパラメータを$\mathbf{w}_{\backslash 0} = (w_1, w_2, \cdots, w_{M-1})$で表します(が、この表記はもう登場しません)。
また、定義より$\phi_0(\mathbf{x}_n) = 1$なので、二乗和誤差関数の式を$w_0 = w_0 \phi_0(\mathbf{x}_n)$を取り出して
$$
E_D(\mathbf{w})
= \frac{1}{2}
\sum_{n=1}^N \Bigl(
t_n
- \sum_{j=0}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
= \frac{1}{2}
\sum_{n=1}^N \Bigl(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
$$
としておきます。
よって、誤差関数は
$$
\begin{align}
E_{\mathrm{Lasso}}(\mathbf{w})
&= E_D(\mathbf{w})
+ E_W(\mathbf{w}_{\backslash 0})
\\
&= \frac{1}{2}
\sum_{n=1}^N \Bigl(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
+ \lambda
\sum_{j=1}^{M-1}
|w_j|
\tag{5}
\end{align}
$$
となります。
$w_0$に関して誤差関数(5)を微分します。
$$
\begin{aligned}
\frac{\partial}{\partial w_0}
E_{\mathrm{Lasso}}(\mathbf{w})
&= \frac{\partial}{\partial w_0} \left\{
\frac{1}{2}
\sum_{n=1}^N \Bigl(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
+ \lambda
\sum_{j=1}^{M-1}
|w_j|
\right\}
\\
&= \frac{1}{2}
\frac{\partial}{\partial w_0} \left\{
\sum_{n=1}^N \Bigl(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\Bigr)^2
\right\}
+ \lambda
\frac{\partial}{\partial w_0} \left\{
\sum_{j=1}^{M-1}
|w_j|
\right\}
\end{aligned}
$$
正則化項は$w_0$を含まないので微分すると0になり、二乗和誤差関数の微分となります。
$$
\begin{aligned}
\frac{\partial}{\partial w_0}
E_{\mathrm{Lasso}}(\mathbf{w})
&= \sum_{n=1}^N \left(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\frac{\partial}{\partial w_0} \left\{
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right\}
+ 0
\\
&= \sum_{n=1}^N \left(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\left(
\frac{\partial}{\partial w_0}
t_n
- \frac{\partial}{\partial w_0}
w_0
- \frac{\partial}{\partial w_0}
\sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\\
&= \sum_{n=1}^N \left(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
(0 - 1 + 0)
\\
&= - \sum_{n=1}^N \left(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\end{aligned}
$$
先ほど求めた$w_k$に関する二乗和誤差関数の微分における、$k = 0$のときと同じ式になります。
誤差関数の微分を0とおき、$w_0$について解きます。
$$
\begin{aligned}
\frac{\partial}{\partial w_0}
E_{\mathrm{Lasso}}(\mathbf{w})
= - \sum_{n=1}^N
&\left(
t_n
- w_0
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
= 0
\\
\Rightarrow
N w_0
&= \sum_{n=1}^N \left(
t_n
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\\
\Rightarrow
w_0
&= \frac{1}{N}
\sum_{n=1}^N \left(
t_n
- \sum_{j=1}^{M-1}
w_j \phi_j(\mathbf{x}_n)
\right)
\equiv
w_0^{(\mathrm{Lasso})}
\end{aligned}
$$
バイアスパラメータの最尤解が得られました。絶対値の微分を含まないため場合分けや劣微分は不要です。$j = 1, \cdots, M - 1$の項については、$w_k^{(\mathrm{Lasso})}$になります。
参考文献
- C.M.ビショップ著,元田 浩・他訳『パターン認識と機械学習 上下』,丸善出版,2012年.
おわりに
L2よりL1の方が難しいのね。まだ理解がふわっとしている。劣微分???
2021年12月1日は、元Juice=Juiceの宮本佳林さんの23歳のお誕生日&ソロデビューシングルの発売日です。シングルの3曲をどうぞ♪♪♪
おめでとう!そしておめでとう!
あとこのブログの解説日でもあります。4年目もハロプロ記念日駆動執筆でやっていきます♬
【次節の内容】
www.anarchive-beta.com