はじめに
Matplotlibライブラリを利用して、球面のグラフを作成します。
【前の内容】
【目次】
球面の作図
Matplotlibライブラリを利用して、3次元空間上に球面(spherical surface)のグラフを作成します。また、球面座標系(spherical coordinate system)をグラフで確認します。
利用するライブラリを読み込みます。
# 利用ライブラリ import numpy as np import matplotlib.pyplot as plt from matplotlib.animation import FuncAnimation
座標の計算
まずは、球面上の点の座標計算を確認します。
角度と半径を指定して、球面上の点(ノルムが指定した半径になる3次元ベクトル)を計算します。
# 半径を指定 r = 14.0 # 度数法の角度を指定 t = 45.0 u = 180.0 # 弧度法の角度(ラジアン)を計算 t *= np.pi / 180.0 u *= np.pi / 180.0 print(t) print(u) # 球面上の点の座標を計算 x = r * np.sin(t) * np.cos(u) y = r * np.sin(t) * np.sin(u) z = r * np.cos(t) # 座標を格納 p = np.array([x, y, z]) print(p) print(np.linalg.norm(p))
0.7853981633974483
3.141592653589793
[-9.89949494e+00 1.21233848e-15 9.89949494e+00]
14.0
度数法における角度を、弧度法における角度(ラジアン)を
で表すことにします。度数法と弧度法は
、
の関係です。つまり、
のとき
、
のとき
、
のとき
です。
は円周率で、
np.piで扱えます。
半径を、垂直方向の角度(z軸とのなす角)を
、水平方向の角度(y軸とのなす角)を
とします。オブジェクト名は
r, t, uとします。
半径がの曲面上の点(ノルムが
の3次元ベクトル)を
とすると、x軸・y軸・z軸の座標は、次の式で計算できます。
直交座標系の座標を、球面座標系の座標を
で表します。
式(1)は、球面座標系から直交座標系への変換式です。
のユークリッドノルム
は
になります。ユークリッドノルムは、
np.linalg.norm()で計算できます。
あるいは、3次元ベクトルを指定して、球面上の点(ノルムが指定した半径になるベクトル)に変換します。
# ベクトルを指定 p = np.array([10.0, 17.0, 12.0]) #p = np.array([x, y, z]) # 確認用 print(np.linalg.norm(p)) # 半径を指定 r = 14.0 # ノルムをrに変換(球面上の座標を計算) p *= r / np.linalg.norm(p) print(p) print(np.linalg.norm(p))
23.08679276123039
[ 6.06407315 10.30892435 7.27688777]
14.000000000000002
任意の3次元ベクトルを指定して、ノルムで割り正規化(ノルムを1に変換)します。さらに、半径
を掛けるとノルムが
のベクトルになります。
この計算により、3次元空間上の点と角度
が同じである球面上の点(ベクトル
と同じ方向であるノルムが
のベクトル)
が得られます。ベクトルのスカラ倍なのでベクトルの向きは変わりません。
球面上の点から半径と角度を計算します。
# 半径を計算 r = np.linalg.norm(p) print(r) # 垂直方向の角度(ラジアン)を計算 t = np.arccos(p[2] / np.linalg.norm(p)) print(t) # 水平方向の角度(ラジアン)を計算 sgn_y = 1.0 if p[1] >= 0.0 else -1.0 u = sgn_y * np.arccos(p[0] / np.linalg.norm(p[[0, 1]])) print(u) # 度数法の角度を計算 t *= 180.0 / np.pi u *= 180.0 / np.pi print(t) print(u)
14.000000000000002
1.0242056113903688
1.039072259536091
58.68265888628425
59.53445508054013
半径と2方向の角度
は、次の式で計算できます。
は逆コサイン関数(コサイン関数
の逆関数)で、
np.arccos()で計算できます。y軸の値の符号を
で表しています。
式(2)は、直交座標系から曲面座標系への変換式です。
ここでは、2通りの座標計算方法を確認しました。以降は、1つ目の方法を用います。
球面の描画
次は、球面全体の座標を計算して、球面のグラフを作成します。
1周期分のラジアンを作成して、球面上の座標を計算します。周期については「2変数と各軸の値の関係」で確認します。
# 半径を指定 r = 1.0 # ラジアンを作成 t = np.linspace(start=0.0, stop=2.0*np.pi, num=81) u = np.linspace(start=0.0, stop=2.0*np.pi, num=81) print(t[:5]) print(len(t)) # 格子点を作成 T, U = np.meshgrid(t, u) print(T[:3, :3].round(2)) print(U[:3, :3].round(2)) print(T.shape) print(U.shape) # 球面の座標を計算 X = r * np.sin(T) * np.cos(U) Y = r * np.sin(T) * np.sin(U) Z = r * np.cos(T) print(X[:3, :3].round(2)) print(Y[:3, :3].round(2)) print(Z[:3, :3].round(2))
[0. 0.07853982 0.15707963 0.23561945 0.31415927]
81
[[0. 0.08 0.16]
[0. 0.08 0.16]
[0. 0.08 0.16]]
[[0. 0. 0. ]
[0.08 0.08 0.08]
[0.16 0.16 0.16]]
(81, 81)
(81, 81)
[[0. 0.08 0.16]
[0. 0.08 0.16]
[0. 0.08 0.15]]
[[0. 0. 0. ]
[0. 0.01 0.01]
[0. 0.01 0.02]]
[[1. 1. 0.99]
[1. 1. 0.99]
[1. 1. 0.99]]
、
の範囲のラジアン
t, uを作成して、格子状の点(全ての組み合わせ)T, Uをnp.meshgrid()で作成します。
の範囲(最大値と最小値の差)が
であれば、他の値であっても同じグラフになります。また、片方の角度の範囲が
でも球面を描画できます。
T, Uを用いて、座標の計算式(1)を計算して、x軸・y軸・z軸の値をそれぞれX, Y, Zとします。
色付け用の配列を作成します。また確認のため、点ごとにノルムを計算します。
# 3つの軸の値を結合 XYZ = np.stack([X.flatten(), Y.flatten(), Z.flatten()], axis=1) print(XYZ[:5]) print(XYZ.shape) print(np.linalg.norm(XYZ, axis=1)[:5])
[[0. 0. 1. ]
[0.0784591 0. 0.99691733]
[0.15643447 0. 0.98768834]
[0.23344536 0. 0.97236992]
[0.30901699 0. 0.95105652]]
(6561, 3)
[1. 1. 1. 1. 1.]
色付けやノルムの計算用に、X, Y, Zをそれぞれ1列として結合した配列XYZを作成します。
np.linalg.norm()のaxix引数に1を指定して行(点)ごとにノルムを計算すると、どの点も値がrになるのを確認できます。
球面のグラフを作成します。
# タイトル用の文字列(座標の計算式)を作成 coord_label = '$x = r\ \\sin \\theta\ \cos \phi$\n' coord_label += '$y = r\ \\sin \\theta\ \sin \phi$\n' coord_label += '$z = r\ \\cos \\theta$' # 球面を作図 fig, ax = plt.subplots(figsize=(8, 8), facecolor='white', subplot_kw={'projection': '3d'}) ax.plot_wireframe(X, Y, Z, alpha=0.5) # くり抜き曲面 #ax.plot_surface(X, Y, Z, cmap='jet', alpha=0.5) # 塗りつぶし曲面 #ax.scatter(X, Y, Z, c=Z, cmap='viridis', alpha=0.5) # 散布図:(z軸の値により色付け) #ax.scatter(X, Y, Z, color=(XYZ+r)*0.5/r, alpha=0.5) # 散布図:(xyz座標の値により色付け) ax.contour(X, Y, Z, cmap='jet', zdir='z', offset=-r) # 等高線 ax.set_xlabel('x') ax.set_ylabel('y') ax.set_zlabel('z') ax.set_title('$r=' + str(r) + '$\n' + coord_label, loc='left') fig.suptitle('spherical surface', fontsize=20) ax.set_aspect('equal') plt.show()
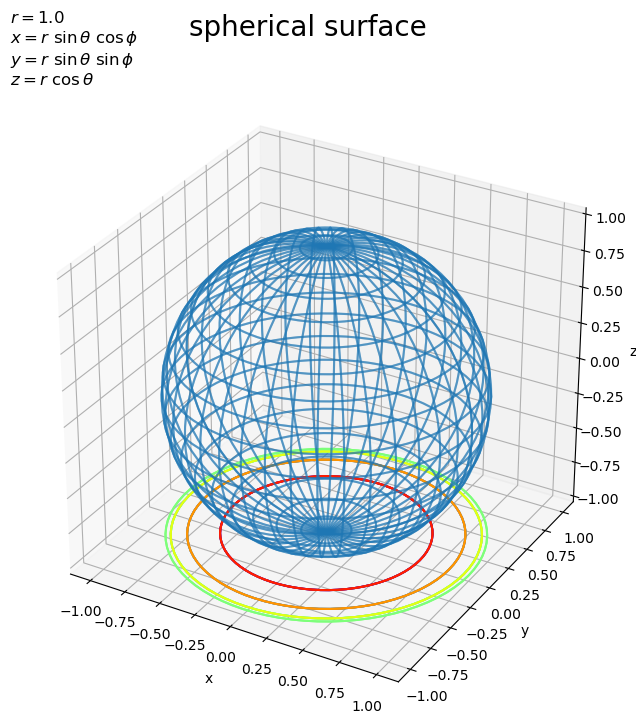
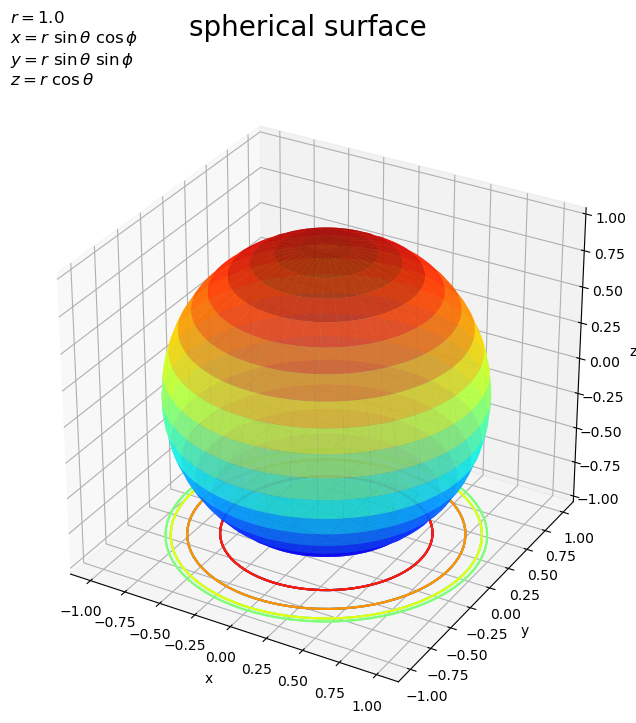

Axes.plot_wireframe()で曲面図、Axes.plot_surface()で塗りつぶしの曲面図、Axes.scatter()で散布図として球面を描画できます。
参考として、底面(z軸の最小値の面)に
ax.contour()で等高線図を描画しています。zdir引数に'x'や'y'を指定すると側面に描画できます。デフォルトは'z'で、底面に描画します。offset引数に値を指定して、描画位置を指定できます。
綺麗な球面を描画するには、Axes.set_aspect('equal')を使ってアスペクト比を1に設定します。
cmap引数にカラーマップ名を指定して、z軸の値などに応じてグラデーションで色付けられます。
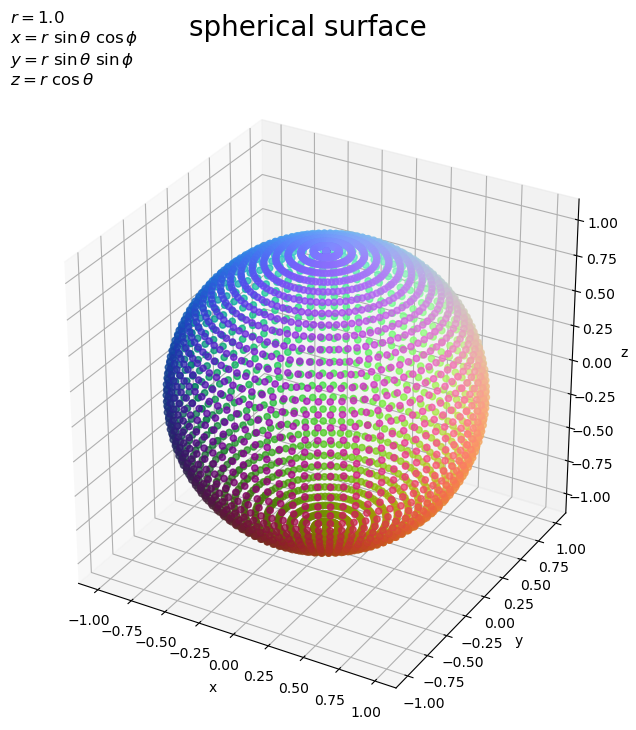
散布図に関して、color引数に「各点の座標を正規化した値をRGB値」として指定して、点ごとの座標に応じて色付けられます。各軸の値は最小値が
、最大値が
です。そこで、各点に
を足すことで
から
の値になり、さらに
で割ることで
から
の値に変換できます。x軸の値が大きい(
が
に近く
が
に近い)ほど赤色、y軸の値が大きいほど緑色、z軸の値が大きいほど青色に近い色になります。
グラフを回転させて確認します。
・作図コード(クリックで展開)
# フレーム数を指定 frame_num = 59 # 表示角度として利用する値を作成 v_n = np.linspace(start=30.0, stop=30.0, num=frame_num+1)[:frame_num] h_n = np.linspace(start=0.0, stop=360.0, num=frame_num+1)[:frame_num] # グラフオブジェクトを初期化 fig, ax = plt.subplots(figsize=(8, 8), facecolor='white', subplot_kw={'projection': '3d'}) fig.suptitle('spherical surface', fontsize=20) # 作図処理を関数として定義 def update(i): # 前フレームのグラフを初期化 plt.cla() # i番目の角度を取得 v = v_n[i] h = h_n[i] # 球面を作図 ax.scatter(X, Y, Z, color=(XYZ+r)*0.5/r, alpha=0.5) # 散布図:(xyz座標の値により色付け) ax.quiver([0, 0, 0], [0, 0, 0], [0, 0, 0], [1, 0, 0], [0, 1, 0], [0, 0, 1], color='black', lw=2, arrow_length_ratio=0.0, zorder=-50) # x,y,z軸 ax.set_xlabel('x') ax.set_ylabel('y') ax.set_zlabel('z') ax.set_title('$r=' + str(r) + '$\n' + coord_label, loc='left') ax.set_aspect('equal') ax.view_init(elev=v, azim=h) # 表示角度 # gif画像を作成 ani = FuncAnimation(fig=fig, func=update, frames=frame_num, interval=100) # gif画像を保存 ani.save('sphere_3d.gif')
作図処理をupdate()として定義して、FuncAnimation()でgif画像を作成します。
x軸・y軸・z軸を黒色の線分として描画しています。
球面は、原点からの距離(ノルム)がの点なのが分かります。
以上で、球面を描画できました。次からは、2つの変数(角度)と3つの軸の値の関係を確認します。
2変数と各軸の値の関係
2つの角度とx軸・y軸・z軸それぞれの値の関係をグラフで確認します。
1周期分以上のラジアンを作成して、球面の座標を計算します。
# 半径を指定 r = 1.0 # ラジアンを作成 t = np.linspace(start=-2.0*np.pi, stop=2.0*np.pi, num=200) u = np.linspace(start=-2.0*np.pi, stop=2.0*np.pi, num=200) print(t[:5]) print(len(t)) # 格子点を作成 T, U = np.meshgrid(t, u) print(T.shape) print(U.shape) # 球面の座標を計算 X = r * np.sin(T) * np.cos(U) Y = r * np.sin(T) * np.sin(U) Z = r * np.cos(T) print(X[:3, :3].round(2)) print(Y[:3, :3].round(2)) print(Z[:3, :3].round(2))
[-6.28318531 -6.22003772 -6.15689013 -6.09374253 -6.03059494]
200
(200, 200)
(200, 200)
[[0. 0.06 0.13]
[0. 0.06 0.13]
[0. 0.06 0.12]]
[[0. 0. 0. ]
[0. 0. 0.01]
[0. 0.01 0.02]]
[[1. 1. 0.99]
[1. 1. 0.99]
[1. 1. 0.99]]
「球面の描画」のときと同様にして、球面の座標を計算します。ただしこの例では、周期性が分かるように、ラジアンの範囲をそれぞれ
から
とします。
軸・
軸のラジアン目盛用の配列を作成します。グラフ自体には不要な処理です。
# 半円の目盛の数(分母の値)を指定 denom = 3.0 # 目盛の通し番号(分子の値)を作成 tick_vals = np.arange(start=-2.0*denom, stop=2.0*denom+0.1) print(tick_vals[:5]) # 目盛用のラジアンを計算 tick_rad_vals = tick_vals / denom * np.pi print(tick_rad_vals[:5].round(2)) # 目盛ラベルを作成 tick_label_vals = [ '$' + ('-' if nomer < 0.0 else '') + '\\frac{' + str(abs(nomer)) + '}{' + str(int(denom)) + '} \pi$' for nomer in tick_vals.astype('int16') ] print(tick_label_vals[:3])
[-6. -5. -4. -3. -2.]
[-6.28 -5.24 -4.19 -3.14 -2.09]
['$-\\frac{6}{3} \\pi$', '$-\\frac{5}{3} \\pi$', '$-\\frac{4}{3} \\pi$']
軸目盛ラベルをの形で表示することにします。この例では2周期分を描画するので、
を
から
の整数
とします。
を
denom、を
tick_valsとして値を指定します。
軸目盛の座標用のラジアンを計算して
tick_rad_valsとします。
と
の関係のグラフを作成します。
# x軸の値を曲面で作図 fig, ax = plt.subplots(figsize=(12, 8), facecolor='white', subplot_kw={'projection': '3d'}) ax.plot_surface(T, U, X, cmap='jet', alpha=0.8) ax.contour(T, U, X, cmap='jet', zdir='z', offset=-r) ax.set_xticks(ticks=tick_rad_vals, labels=tick_label_vals) # θ目盛ラベル ax.set_yticks(ticks=tick_rad_vals, labels=tick_label_vals) # φ目盛ラベル ax.set_xlabel('$\\theta$') ax.set_ylabel('$\phi$') ax.set_zlabel('$x$') ax.set_title('$r=' + str(r) + '$', loc='left') fig.suptitle('$x = r\ \\sin \\theta\ \cos \phi$', fontsize=20) ax.set_aspect('equal') plt.show()
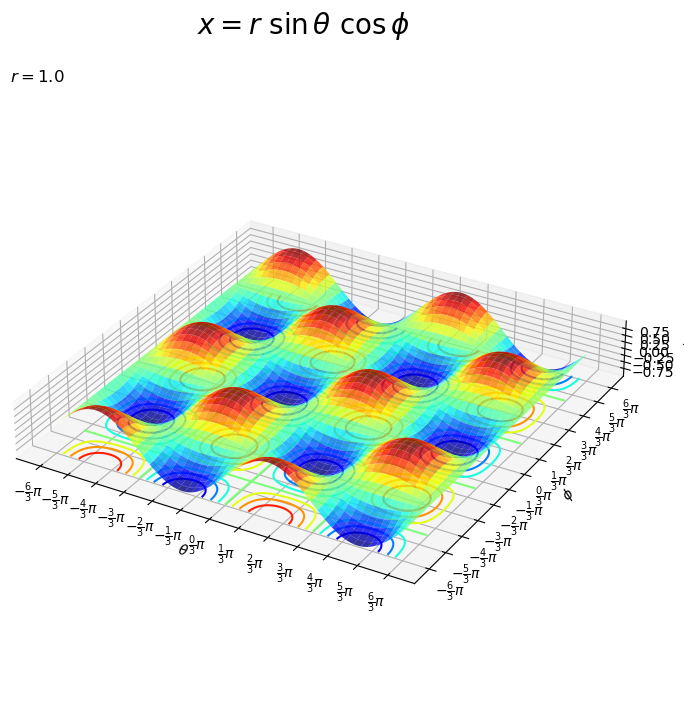
それぞれで
の
の値が一致するのが分かります。それぞれの軸で
ごとに周期的に推移します。
と
の関係のグラフを作成します。
# y軸の値を曲面で作図 fig, ax = plt.subplots(figsize=(12, 8), facecolor='white', subplot_kw={'projection': '3d'}) ax.plot_surface(T, U, Y, cmap='jet', alpha=0.8) ax.contour(T, U, Y, cmap='jet', zdir='z', offset=-r) ax.set_xticks(ticks=tick_rad_vals, labels=tick_label_vals) # θ目盛ラベル ax.set_yticks(ticks=tick_rad_vals, labels=tick_label_vals) # φ目盛ラベル ax.set_xlabel('$\\theta$') ax.set_ylabel('$\phi$') ax.set_zlabel('$y$') ax.set_title('$r=' + str(r) + '$', loc='left') fig.suptitle('$y = r\ \\sin \\theta\ \\sin \phi$', fontsize=20) ax.set_aspect('equal') plt.show()
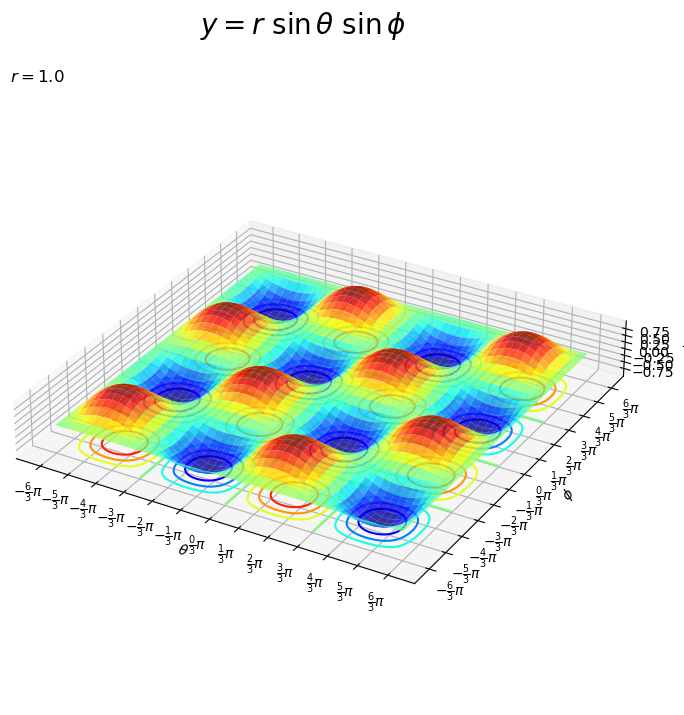
こちらもごとに周期します。
と
の関係のグラフを作成します。
# z軸の値を曲面で作図 fig, ax = plt.subplots(figsize=(12, 8), facecolor='white', subplot_kw={'projection': '3d'}) ax.plot_surface(T, U, Z, cmap='jet', alpha=0.8) ax.contour(T, U, Z, cmap='jet', zdir='z', offset=-r) ax.set_xticks(ticks=tick_rad_vals, labels=tick_label_vals) # θ目盛ラベル ax.set_yticks(ticks=tick_rad_vals, labels=tick_label_vals) # φ目盛ラベル ax.set_xlabel('$\\theta$') ax.set_ylabel('$\phi$') ax.set_zlabel('$z$') ax.set_title('$r=' + str(r) + '$', loc='left') fig.suptitle('$z = r\ \\cos \\theta$', fontsize=20) ax.set_aspect('equal') plt.show()
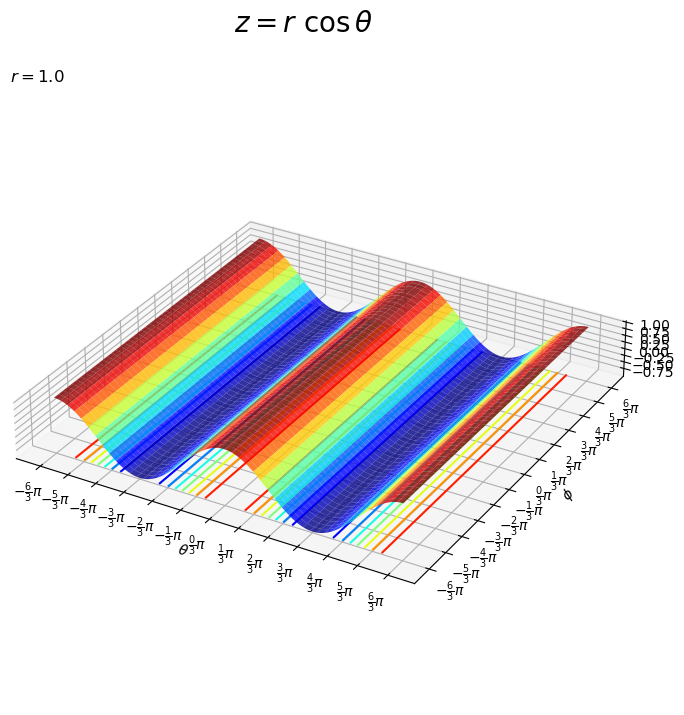
は
と無関係なので、
の値によってのみ変化します。
について
ごとに周期します。
ここでは、2変数(角度)と3つの軸それぞれの値の関係を確認しました。次は、全ての軸の値との関係を確認します。
2変数と座標の関係
最後に、球面上に2変数(角度)に関する軸目盛を描画して、変数と座標の関係をグラフで確認します。
球面の座標を計算します。
# ラジアンを作成 t = np.linspace(start=0.0, stop=0.5*np.pi, num=50) u = np.linspace(start=0.0, stop=0.5*np.pi, num=50) print(t[:5]) print(len(t)) # 格子点を作成 T, U = np.meshgrid(t, u) print(T.shape) print(U.shape) # 半径を指定 r = 1.0 # 球面の座標を計算 X = r * np.sin(T) * np.cos(U) Y = r * np.sin(T) * np.sin(U) Z = r * np.cos(T)
[0. 0.03205707 0.06411414 0.0961712 0.12822827]
50
(50, 50)
(50, 50)
「球面の描画」のときと同様にして、球面の座標を計算します。ただしこの例では、目盛が見えやすいように、と
の範囲のみを描画します。そのため、ラジアン
の範囲をそれぞれ
から
とします。
軸・
軸目盛用の配列を作成します。
# 半円の目盛の数(分母の値)を指定 denom = 3.0 # 目盛の通し番号(分子の値)を作成 tick_vals = np.arange(stop=2.0*denom) print(tick_vals) # 目盛用のラジアンを計算 tick_rad_vals = tick_vals / denom * np.pi print(tick_rad_vals.round(2)) # 目盛用の座標を計算 tick_rsin_vals = r * np.sin(tick_rad_vals) tick_rcos_vals = r * np.cos(tick_rad_vals) print(tick_rsin_vals.round(2)) print(tick_rcos_vals.round(2))
[0. 1. 2. 3. 4. 5.]
[0. 1.05 2.09 3.14 4.19 5.24]
[ 0. 0.87 0.87 0. -0.87 -0.87]
[ 1. 0.5 -0.5 -1. -0.5 0.5]
「2変数と各軸の値の関係」のときと同様にして、ラジアン目盛用の値を作成します。この例では1周期分を描画するので、を
から
の整数
とします。
さらに、軸目盛用のラジアンtick_rad_valsを用いて、目盛の描画位置の座標を計算します。
のときの
に対する値(曲面上の直線・球の断面の円)が、
軸線に対応します。
なので、座標の計算式(1)は
になります。
同様に、のときの
に対する値が、
軸線に対応します。
なので、座標の計算式(1)は
になります。
軸と
軸の目盛の座標は共通の値になりました。
そこで、固定しない場合のの値を共通のラジアン
tick_rad_valsとしておき、r倍したサイン関数の値をtick_rsin_vals、r倍したコサイン関数の値をtick_rcos_valsとして、それぞれの軸目盛の描画に使います。
軸・
軸線用の配列を作成します。
# 軸線用のラジアンを作成 axis_rad_vals = np.linspace(start=0.0, stop=2.0*np.pi, num=100) # 軸線用の座標を計算 axis_rsin_vals = r * np.sin(axis_rad_vals) axis_rcos_vals = r * np.cos(axis_rad_vals)
軸目盛の座標のときと同様にして、軸線の座標を計算します。
軸線用のラジアンを
axis_rad_valsとして、と
を計算して
axis_***_valsとします。
なす角の角マークと角ラベル用の配列を作成します。
# 角マーク用のラジアンを作成 angle_rad_vals = np.linspace(start=0.0, stop=1.0/denom*np.pi, num=50) # 角マーク用の座標を計算 d = 0.1 angle_rsin_vals = d * np.sin(angle_rad_vals) angle_rcos_vals = d * np.cos(angle_rad_vals) # 角ラベル用の座標を計算 d = 0.15 angle_rsin = d * np.sin(0.5/denom*np.pi) angle_rcos = d * np.cos(0.5/denom*np.pi)
この例では、なす角を示すために、それぞれ軸目盛1つ分の角マークを表示することにします。
そこで、角マーク用のラジアンを
angle_rad_valsとして、円弧の座標と
を計算して
angle_***_valsとします。
角ラベルは、角マークの中点に表示することにします。
そこで、と
を計算して
angle_***とします。
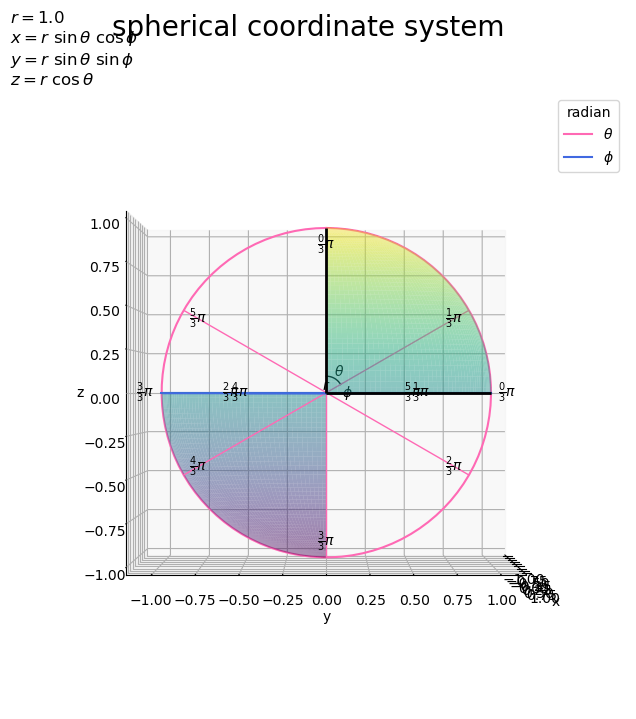
球面上に2つの変数(角度)軸を重ねて表示したグラフを作成します。
# タイトル用の文字列(座標の計算式)を作成 coord_label = '$x = r\ \\sin \\theta\ \cos \phi$\n' coord_label += '$y = r\ \\sin \\theta\ \sin \phi$\n' coord_label += '$z = r\ \\cos \\theta$' # 球面上の変数(ラジアン)目盛を作図 fig, ax = plt.subplots(figsize=(8, 8), facecolor='white', subplot_kw={'projection': '3d'}) ax.plot_surface(X, Y, Z, cmap='viridis', vmin=-r, vmax=r, alpha=0.5, zorder=50) # 第1象限 ax.plot_surface(-X, -Y, -Z, cmap='viridis', vmin=-r, vmax=r, alpha=0.5, zorder=50) # 第3象限 ax.plot(np.zeros_like(axis_rad_vals), axis_rsin_vals, axis_rcos_vals, color='hotpink', label='$\\theta$', zorder=0) # θ軸 ax.plot(axis_rsin_vals, axis_rcos_vals, np.zeros_like(axis_rad_vals), color='royalblue', label='$\phi$', zorder=0) # φ軸 ax.quiver(*np.repeat([[0, 0, 0]], repeats=len(tick_rad_vals), axis=0).T, np.zeros_like(tick_rad_vals), tick_rsin_vals, tick_rcos_vals, color='hotpink', lw=1, ls='-', arrow_length_ratio=0.0, zorder=-100) # θ目盛線 ax.quiver(*np.repeat([[0, 0, 0]], repeats=len(tick_rad_vals), axis=0).T, tick_rsin_vals, tick_rcos_vals, np.zeros_like(tick_rad_vals), color='royalblue', lw=1, ls='-', arrow_length_ratio=0.0, zorder=-100) # φ目盛線 for i in range(len(tick_vals)): d = 0.9 ax.text(0.0, tick_rsin_vals[i]*d, tick_rcos_vals[i]*d, s='$\\frac{' + str(int(tick_vals[i])) + '}{' + str(int(denom)) + '} \pi$', ha='center', va='center', zorder=100) # θ目盛ラベル d = 1.1 ax.text(tick_rsin_vals[i]*d, tick_rcos_vals[i]*d, 0.0, s='$\\frac{' + str(int(tick_vals[i])) + '}{' + str(int(denom)) + '} \pi$', ha='center', va='center', zorder=100) # φ目盛ラベル ax.quiver([0, 0, 0], [0, 0, 0], [0, 0, 0], [1, 0, 0], [0, 1, 0], [0, 0, 1], color='black', lw=2, arrow_length_ratio=0.0, zorder=-50) # x,y,z軸 ax.plot(np.zeros_like(angle_rad_vals), angle_rsin_vals, angle_rcos_vals, color='black', lw=1, zorder=-100) # θの角マーク ax.plot(angle_rsin_vals, angle_rcos_vals, np.zeros_like(angle_rad_vals), color='black', lw=1, zorder=-100) # φの角マーク ax.text(0.0, angle_rsin, angle_rcos, s='$\\theta$', ha='center', va='center', zorder=-100) # θの角ラベル ax.text(angle_rsin, angle_rcos, 0.0, s='$\phi$', ha='center', va='center', zorder=-100) # φの角ラベル ax.text(0.5*r, 0.0, 0.0, s='$r$', ha='center', va='bottom', zorder=-100) # 半径rラベル ax.set_xlabel('x') ax.set_ylabel('y') ax.set_zlabel('z') ax.set_title('$r=' + str(r) + '$\n' + coord_label, loc='left') fig.suptitle('spherical coordinate system', fontsize=20) ax.legend(title='radian') ax.set_aspect('equal') #ax.view_init(elev=90, azim=270) # xy面 #ax.view_init(elev=0, azim=0) # yz面 plt.show()
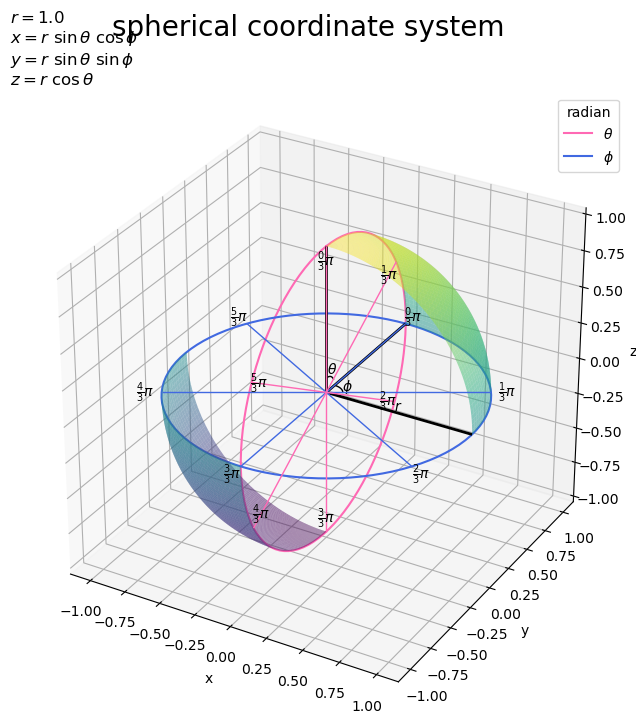
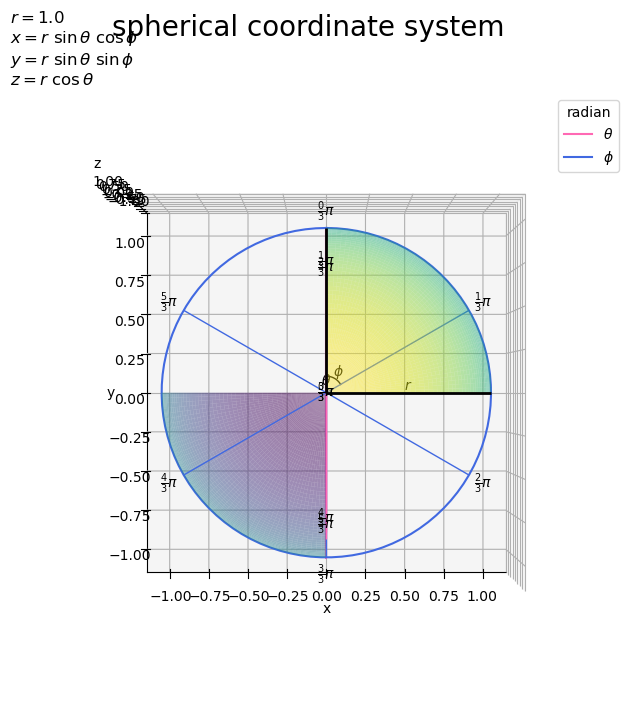
軸目盛線をAxes.quiver()で描画します。第1・2・3引数に始点の座標、第4・5・6引数にベクトルのサイズ(移動量)を指定します。また、矢のサイズの引数arrow_length_ratioに0を指定して、線分を描画します。
始点は原点です。配列の前に*を付けてアンパック(展開)して座標を指定しています。
目盛ラベルや角ラベルをAxes.text()で描画します
xz面を見ると、z軸線から時計回りの角度(なす角)がに対応しているのが分かります。同様に、xy面を見ると、y軸線から時計回りの角度が
に対応しているのが分かります。反時計回りの角度は負の値で表現できます。
グラフを回転させたアニメーションで確認します。
・作図コード(クリックで展開)
# フレーム数を指定 frame_num = 60 # 表示角度として利用する値を作成 h_n = np.linspace(start=0.0, stop=360.0, num=frame_num+1)[:frame_num] # グラフオブジェクトを初期化 fig, ax = plt.subplots(figsize=(8, 8), facecolor='white', subplot_kw={'projection': '3d'}) fig.suptitle('spherical coordinate system', fontsize=20) # 作図処理を関数として定義 def update(i): # 前フレームのグラフを初期化 plt.cla() # i番目の角度を取得 h = h_n[i] # 球面上の変数(ラジアン)目盛を作図 ax.plot_surface(X, Y, Z, cmap='viridis', vmin=-r, vmax=r, alpha=0.5, zorder=50) # 第1象限 ax.plot_surface(-X, -Y, -Z, cmap='viridis', vmin=-r, vmax=r, alpha=0.5, zorder=50) # 第3象限 ax.plot(np.zeros_like(axis_rad_vals), axis_rsin_vals, axis_rcos_vals, color='hotpink', label='$\\theta$', zorder=0) # θ軸 ax.plot(axis_rsin_vals, axis_rcos_vals, np.zeros_like(axis_rad_vals), color='royalblue', label='$\phi$', zorder=0) # φ軸 ax.quiver(*np.repeat([[0, 0, 0]], repeats=len(tick_rad_vals), axis=0).T, np.zeros_like(tick_rad_vals), tick_rsin_vals, tick_rcos_vals, color='hotpink', lw=1, ls='-', arrow_length_ratio=0.0, zorder=-100) # θ目盛線 ax.quiver(*np.repeat([[0, 0, 0]], repeats=len(tick_rad_vals), axis=0).T, tick_rsin_vals, tick_rcos_vals, np.zeros_like(tick_rad_vals), color='royalblue', lw=1, ls='-', arrow_length_ratio=0.0, zorder=-100) # φ目盛線 for i in range(len(tick_vals)): d = 0.9 ax.text(0.0, tick_rsin_vals[i]*d, tick_rcos_vals[i]*d, s='$\\frac{' + str(int(tick_vals[i])) + '}{' + str(int(denom)) + '} \pi$', ha='center', va='center', zorder=100) # θ目盛ラベル d = 1.1 ax.text(tick_rsin_vals[i]*d, tick_rcos_vals[i]*d, 0.0, s='$\\frac{' + str(int(tick_vals[i])) + '}{' + str(int(denom)) + '} \pi$', ha='center', va='center', zorder=100) # φ目盛ラベル ax.quiver([0, 0, 0], [0, 0, 0], [0, 0, 0], [1, 0, 0], [0, 1, 0], [0, 0, 1], color='black', lw=2, arrow_length_ratio=0.0, zorder=-50) # x,y,z軸 ax.plot(np.zeros_like(angle_rad_vals), angle_rsin_vals, angle_rcos_vals, color='black', lw=1, zorder=-100) # θの角マーク ax.plot(angle_rsin_vals, angle_rcos_vals, np.zeros_like(angle_rad_vals), color='black', lw=1, zorder=-100) # φの角マーク ax.text(0.0, angle_rsin, angle_rcos, s='$\\theta$', ha='center', va='center', zorder=-100) # θの角ラベル ax.text(angle_rsin, angle_rcos, 0.0, s='$\phi$', ha='center', va='center', zorder=-100) # φの角ラベル ax.text(0.5*r, 0.0, 0.0, s='$r$', ha='center', va='bottom', zorder=-100) # 半径rラベル ax.set_xlabel('x') ax.set_ylabel('y') ax.set_zlabel('z') ax.set_title('$r=' + str(r) + '$\n' + coord_label, loc='left') ax.legend(title='radian') ax.set_aspect('equal') ax.view_init(elev=30, azim=360.0-h) # 表示角度 # gif画像を作成 ani = FuncAnimation(fig=fig, func=update, frames=frame_num, interval=100) # gif画像を保存 ani.save('sphere_axis_3d.gif')
この記事では、球面のグラフを作成しました。次の記事では、球面上の2点を繋ぐ線分のグラフを作成します。
おわりに
雰囲気で使ってた曲面座標系とやらに踏み込んでみました。座標の計算式に微妙に違和感があったのですが、円のときと違って「y軸(とz軸)から時計回りに角度が大きくなる」んですね。それが分かっただけでも収穫でした。
その角度(目盛)と座標の関係をどうグラフにしたものか試行錯誤してたのですが、中々格好良い図になったのではないでしょうか(見慣れただけかも)。
なんだか最後にこの曲を聴くのがいい気がします。
𓉔𓇌𓃭𓃭𓍯
【次の内容】
つづく